【图像去雾】基于matlab直方图+retinex+暗通道图像去雾【含Matlab源码 074期】

一、简介
1 Retinex
1.1 理论
Retinex理论始于Land和McCann于20世纪60年代作出的一系列贡献,其基本思想是人感知到某点的颜色和亮度并不仅仅取决于该点进入人眼的绝对光线,还和其周围的颜色和亮度有关。Retinex这个词是由视网膜(Retina)和大脑皮层(Cortex)两个词组合构成的.Land之所以设计这个词,是为了表明他不清楚视觉系统的特性究竟取决于此两个生理结构中的哪一个,抑或是与两者都有关系。
Land的Retinex模型是建立在以下的基础之上的:
(1)真实世界是无颜色的,我们所感知的颜色是光与物质的相互作用的结果。我们见到的水是无色的,但是水膜—肥皂膜却是显现五彩缤纷,那是薄膜表面光干涉的结果;
(2)每一颜色区域由给定波长的红、绿、蓝三原色构成的;
(3)三原色决定了每个单位区域的颜色。Retinex 理论的基本内容是物体的颜色是由物体对长波(红)、中波(绿)和短波(蓝)光线的反射能力决定的,而不是由反射光强度的绝对值决定的;物体的色彩不受光照非均性的影响,具有一致性,即Retinex理论是以色感一致性(颜色恒常性)为基础的。如下图所示,观察者所看到的物体的图像S是由物体表面对入射光L反射得到的,反射率R由物体本身决定,不受入射光L变化。
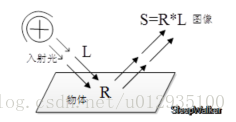
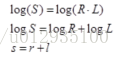
Retinex理论的基本假设是原始图像S是光照图像L和反射率图像R的乘积,即可表示为下式的形式:

基于Retinex的图像增强的目的就是从原始图像S中估计出光照L,从而分解出R,消除光照不均的影响,以改善图像的视觉效果,正如人类视觉系统那样。在处理中,通常将图像转至对数域,即

从而将乘积关系转换为和的关系:
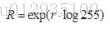
Retinex方法的核心就是估测照度L,从图像S中估测L分量,并去除L分量,得到原始反射分量R,即:

函数 f(x) 实现对照度L的估计(可以去这么理解,实际很多都是直接估计r分量)。
2 Retinex理论的理解
如果大家看论文,那么在接下去的篇幅当中,肯定会介绍两个经典的Retinex算法:基于路径的Retinex以及基于中心/环绕Retinex。在介绍两个经典的Retinex算法之前,我先来讲一点个人的理解,以便第一次接触该理论的朋友能够更快速地理解。当然,如果我的理解有问题,也请大家帮忙指出。
Retinex理论就我理解,与降噪类似,该理论的关键就是合理地假设了图像的构成。如果将观察者看到的图像看成是一幅带有乘性噪声的图像,那么入射光的分量就是一种乘性的,相对均匀,且变换缓慢的噪声。Retinex算法所做的就是合理地估计图像中各个位置的噪声,并除去它。
在极端情况下,我们大可以认为整幅图像中的分量都是均匀的,那么最简单的估计照度L的方式就是在将图像变换到对数域后对整幅图像求均值。因此,我设计了以下算法来验证自己的猜想,流程如下:
(1) 将图像变换到对数域

(2) 归一化去除加性分量

(3) 对步骤3得到的结果求指数,反变换到实数域
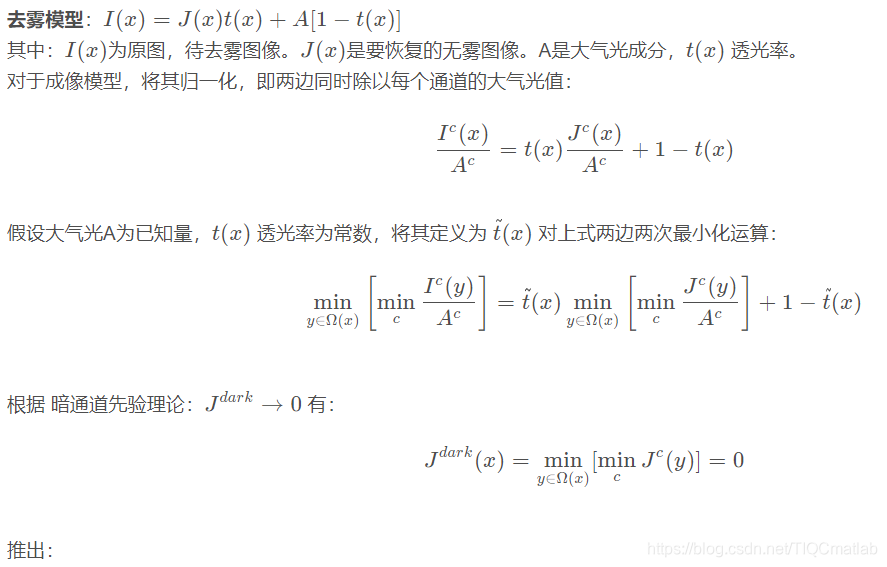
2 暗通道
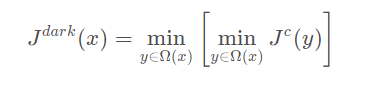
2.1 何恺明的暗通道先验(dark channel prior)去雾算法是CV界去雾领域很有名的算法,关于该算法的论文"Single Image Haze Removal Using Dark Channel Prior"一举获得2009年CVPR最佳论文。作者统计了大量的无雾图像,发现一条规律:每一幅图像的RGB三个颜色通道中,总有一个通道的灰度值很低,几乎趋向于0。基于这个几乎可以视作是定理的先验知识,作者提出暗通道先验的去雾算法。
其暗通道的数学表达式为:

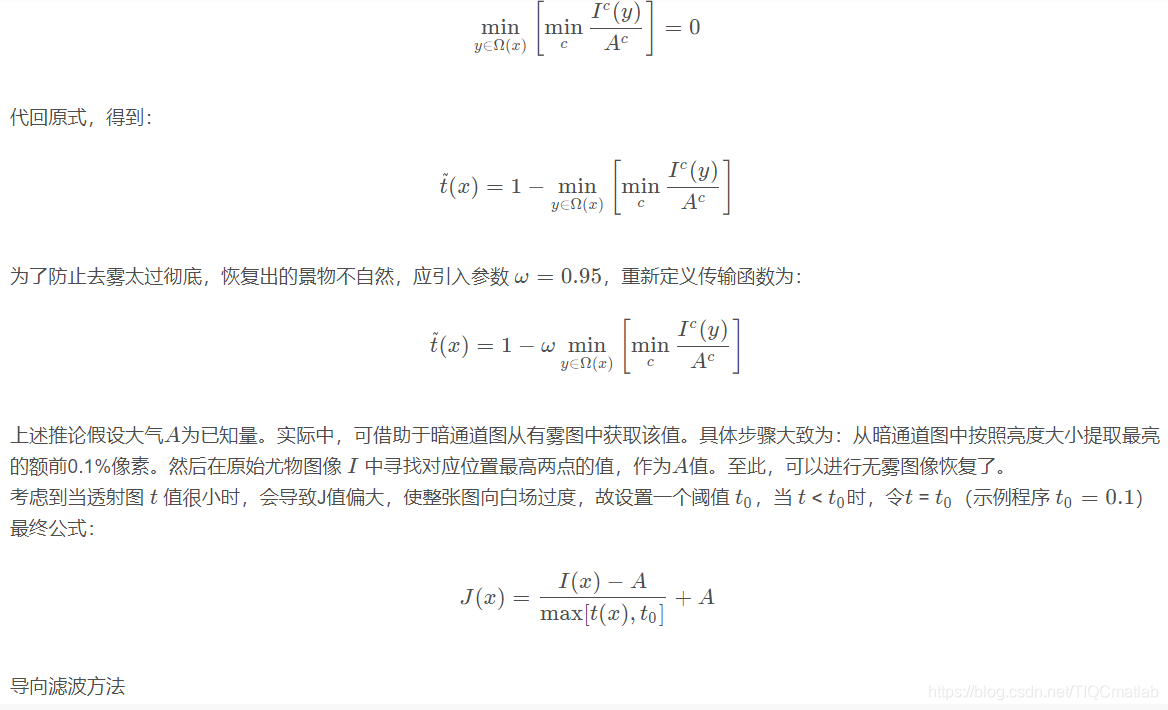
2.1 暗通道去雾原理
二、源代码
clc
clear all;
I=imread('C:\Users\lenovo\Desktop\图像去雾算法代码\毕设代码\fog.jpg');
tic
R=I(:,:,1);
G=I(:,:,2);
B=I(:,:,3);
M=histeq(R);
N=histeq(G);
L=histeq(B);
In=cat(3,M,N,L);
imshow(In);
figure
imshowpair(I, In, 'montage');
t=toc;
[C,L]=size(I); %求图像的规格
Img_size=C*L; %图像像素点的总个数
G=256; %图像的灰度级
H_x=0;
nk=zeros(G,1);%产生一个G行1列的全零矩阵
for i=1:C
for j=1:L
Img_level=I(i,j)+1; %获取图像的灰度级
nk(Img_level)=nk(Img_level)+1; %统计每个灰度级像素的点数
end
end
clear all;
clc;
tic
%一,图像的预处理,读入彩色图像将其灰度化
PS=imread('C:\Users\lenovo\Desktop\图像去雾算法代码\毕设代码\fog.jpg'); %读入BMP彩色图像文件
imshow(PS) %显示出来
title('输入的图像')
%imwrite(rgb2gray(PS),'PicSampleGray.bmp'); %将彩色图片灰度化并保存
R=PS(:,:,1); %灰度化后的数据存入数组
%二,绘制直方图
[m,n]=size(R); %测量图像尺寸参数
GP=zeros(1,256); %预创建存放灰度出现概率的向量
for k=0:255
GP(k+1)=length(find(R==k))/(m*n); %计算每级灰度出现的概率,将其存入GP中相应位置
end
figure,
bar(0:255,GP,'g') %绘制直方图
title('雾天图像的直方图')
xlabel('灰度值')
ylabel('出现概率')
%三,直方图均衡化
S1=zeros(1,256);
for i=1:256
for j=1:i
S1(i)=GP(j)+S1(i); %计算Sk
end
end
S2=round((S1*256)+0.5); %将Sk归到相近级的灰度
for i=1:256
GPeq(i)=sum(GP(find(S2==i))); %计算现有每个灰度级出现的概率
end
figure,bar(0:255,GPeq,'b') %显示均衡化后的直方图
title('均衡化后的直方图')
xlabel('灰度值')
ylabel('出现概率')
%四,图像均衡化
PA=R;
for i=0:255
PA(find(R==i))=S2(i+1); %将各个像素归一化后的灰度值赋给这个像素
end
G=PS(:,:,2); %灰度化后的数据存入数组
%二,绘制直方图
[m,n]=size(R); %测量图像尺寸参数
GPG=zeros(1,256); %预创建存放灰度出现概率的向量
for k=0:255
GPG(k+1)=length(find(G==k))/(m*n); %计算每级灰度出现的概率,将其存入GP中相应位置
end
%三,直方图均衡化
SG=zeros(1,256);
for i=1:256
for j=1:i
SG(i)=GPG(j)+SG(i); %计算Sk
end
end
S2G=round((SG*256)+0.5); %将Sk归到相近级的灰度
for i=1:256
GPeqG(i)=sum(GPG(find(S2G==i))); %计算现有每个灰度级出现的概率
end
%四,图像均衡化
PAG=G;
for i=0:255
PAG(find(G==i))=S2G(i+1); %将各个像素归一化后的灰度值赋给这个像素
end
%figure,imshow(PAG) %显示均衡化后的图像
%title('均衡化后图像')
B=PS(:,:,3); %灰度化后的数据存入数组
%二,绘制直方图
[m,n]=size(B); %测量图像尺寸参数
GPB=zeros(1,256); %预创建存放灰度出现概率的向量
for k=0:255
GPB(k+1)=length(find(B==k))/(m*n); %计算每级灰度出现的概率,将其存入GP中相应位置
end
%三,直方图均衡化
S1B=zeros(1,256);
for i=1:256
for j=1:i
S1B(i)=GPB(j)+S1B(i); %计算Sk
end
end
S2B=round((S1B*256)+0.5); %将Sk归到相近级的灰度
for i=1:256
GPeqB(i)=sum(GPB(find(S2B==i))); %计算现有每个灰度级出现的概率
end
clear all;
tic
I = imread('C:\Users\lenovo\Desktop\图像去雾算法代码\毕设代码\fog.jpg');
R = I(:, :, 1);
%imhist(R);
% figure;
[N1, M1] = size(R);
R0 = double(R);
Rlog = log(R0+1);
Rfft2 = fft2(R0);
sigma = 200;
F = fspecial('gaussian', [N1,M1], sigma);
Efft = fft2(double(F));
DR0 = Rfft2.* Efft;
DR = ifft2(DR0);
DRlog = log(DR +1);
Rr = Rlog - DRlog;
EXPRr = exp(Rr);
%imhist(EXPRr);
%figure;
MIN = min(min(EXPRr));
MAX = max(max(EXPRr));
EXPRr = (EXPRr - MIN)/(MAX - MIN)*255;
EXPRr=uint8(EXPRr);
imhist(EXPRr);
figure;
EXPRr = adapthisteq(EXPRr);
% imhist(EXPRr);
%figure;
G = I(:, :, 2);
G0 = double(G);
Glog = log(G0+1);
Gfft2 = fft2(G0);
DG0 = Gfft2.* Efft;
DG = ifft2(DG0);
DGlog = log(DG +1);
Gg = Glog - DGlog;
EXPGg = exp(Gg);
MIN = min(min(EXPGg));
MAX = max(max(EXPGg));
EXPGg = (EXPGg - MIN)/(MAX - MIN)*255;
EXPGg=uint8(EXPGg);
%imhist(EXPGg);
%figure;
EXPGg = adapthisteq(EXPGg);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
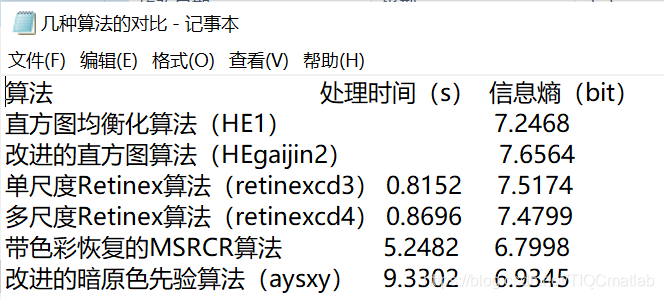
三、运行结果
由于多种算法运行结果较多,此处提供汇总对比:
四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 蔡利梅.MATLAB图像处理——理论、算法与实例分析[M].清华大学出版社,2020.
[2]杨丹,赵海滨,龙哲.MATLAB图像处理实例详解[M].清华大学出版社,2013.
[3]周品.MATLAB图像处理与图形用户界面设计[M].清华大学出版社,2013.
[4]刘成龙.精通MATLAB图像处理[M].清华大学出版社,2015.
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/115867946

- 点赞
- 收藏
- 关注作者
评论(0)