【雷达通信】基于matlab GUI相控阵雷达方向图【含Matlab源码 1048期】

【摘要】
一、获取代码方式
获取代码方式1: 完整代码已上传我的资源:【雷达通信】基于matlab GUI相控阵雷达方向图【含Matlab源码 1048期】
获取代码方式2: 通过订阅紫极神光博客付费专栏,凭支...
一、获取代码方式
获取代码方式1:
完整代码已上传我的资源:【雷达通信】基于matlab GUI相控阵雷达方向图【含Matlab源码 1048期】
获取代码方式2:
通过订阅紫极神光博客付费专栏,凭支付凭证,私信博主,可获得此代码。
备注:
订阅紫极神光博客付费专栏,可免费获得1份代码(有效期为订阅日起,三天内有效);
二、相控阵雷达简介
1 相控阵列的基本原理
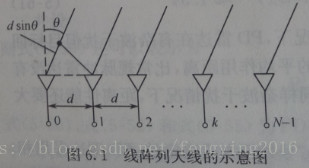
阵列天线有两种基本的形式:一种称为线阵列,所有单元都排列在一条直线上;另一种称为面阵列,辐射单元排列在一个面上,通常是一个平面。




总之,在波束扫描时,扫描的偏角θ0越大,波束越宽,天线增益越小,因而天线波束性能变差。一般,天线扫描角限制在60°以内。
2 相控阵雷达的基本组成


三、部分源代码
function varargout = xiangkongzhen1(varargin)
% XIANGKONGZHEN1 MATLAB code for xiangkongzhen1.fig
% XIANGKONGZHEN1, by itself, creates a new XIANGKONGZHEN1 or raises the existing
% singleton*.
%
% H = XIANGKONGZHEN1 returns the handle to a new XIANGKONGZHEN1 or the handle to
% the existing singleton*.
%
% XIANGKONGZHEN1('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in XIANGKONGZHEN1.M with the given input arguments.
%
% XIANGKONGZHEN1('Property','Value',...) creates a new XIANGKONGZHEN1 or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before xiangkongzhen1_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to xiangkongzhen1_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help xiangkongzhen1
% Last Modified by GUIDE v2.5 28-Apr-2021 16:47:17
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @xiangkongzhen1_OpeningFcn, ...
'gui_OutputFcn', @xiangkongzhen1_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before xiangkongzhen1 is made visible.
function xiangkongzhen1_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to xiangkongzhen1 (see VARARGIN)
% Choose default command line output for xiangkongzhen1
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes xiangkongzhen1 wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = xiangkongzhen1_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% --- Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
N=str2num(get(handles.edit1,'String'));
a=str2num(get(handles.edit3,'String'));
thetaB=str2num(get(handles.edit4,'String'));
thetaB1=thetaB/180*pi
theta=-pi:pi/10791:pi;
sum1=0;
for i=0:N-1
y1=exp(1j*2*pi*i*a*(sin(theta)-sin(thetaB1)));
sum1=sum1+y1;
end
sum=abs(sum1);
maxval=max(sum);
sum=sum./maxval;
axes(handles.axes1);
plot(theta/pi*180,sum,'b');
xlim([-180 180]);
ylim([0 1])
title('线性阵列的归一化幅度图');
% --- Executes on button press in pushbutton2.
function pushbutton2_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
N=str2num(get(handles.edit1,'String'));
a=str2num(get(handles.edit3,'String'));
thetaB=str2num(get(handles.edit4,'String'));
thetaB1=thetaB/180*pi
theta=-pi:pi/10791:pi;
sum1=0;
for i=0:N-1
y1=exp(1j*2*pi*i*a*(sin(theta)-sin(thetaB1)));
sum1=sum1+y1;
end
axes(handles.axes2);
polar(theta,sum1,'-b');
title('线性阵列方向图');
% --- Executes on button press in pushbutton3.
function pushbutton3_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
N=str2num(get(handles.edit1,'String'));
a=str2num(get(handles.edit3,'String'));
thetaB=str2num(get(handles.edit4,'String'));
thetaB1=thetaB/180*pi
theta=-pi:pi/10791:pi;
sum1=N*pi*a.*(sin(theta)-sin(thetaB1));
sum2=N*sin(sum1)./sum1;
sum=abs(sum2);
maxval=max(sum);
sum=sum./maxval;
axes(handles.axes1);
plot(theta/pi*180,sum,'r');
xlim([-180 180]);
ylim([0 1])
title('线性阵列的归一化幅度图(取sinc近似)');
% --- Executes on button press in pushbutton4.
function pushbutton4_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
N=str2num(get(handles.edit1,'String'));
a=str2num(get(handles.edit3,'String'));
thetaB=str2num(get(handles.edit4,'String'));
thetaB1=thetaB/180*pi
theta=-pi:pi/10791:pi;
sum1=N*pi*a.*(sin(theta)-sin(thetaB1));
sum2=N*sin(sum1)./sum1;
axes(handles.axes2);
polar(theta,sum2,'-r');
title('线性阵列方向图(取sinc近似)')
function edit1_Callback(hObject, eventdata, handles)
% hObject handle to edit1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit1 as text
% str2double(get(hObject,'String')) returns contents of edit1 as a double
globel N;
N=get(handles.edit1,'String');
% --- Executes during object creation, after setting all properties.
function edit1_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit2_Callback(hObject, eventdata, handles)
% hObject handle to edit2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit2 as text
% str2double(get(hObject,'String')) returns contents of edit2 as a double
% --- Executes during object creation, after setting all properties.
function edit2_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
四、运行结果



五、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 沈再阳.精通MATLAB信号处理[M].清华大学出版社,2015.
[2]高宝建,彭进业,王琳,潘建寿.信号与系统——使用MATLAB分析与实现[M].清华大学出版社,2020.
[3]王文光,魏少明,任欣.信号处理与系统分析的MATLAB实现[M].电子工业出版社,2018.
[4]李树锋.基于完全互补序列的MIMO雷达与5G MIMO通信[M].清华大学出版社.2021
[5]何友,关键.雷达目标检测与恒虚警处理(第二版)[M].清华大学出版社.2011
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/118094701

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)