【运动学】基于matlab Singer模型算法机动目标跟踪【含Matlab源码 1157期】

【摘要】
一、获取代码方式
获取代码方式1: 完整代码已上传我的资源:【运动学】基于matlab Singer模型算法机动目标跟踪【含Matlab源码 1157期】
获取代码方式2: 通过订阅紫极神光博客付费专...
一、获取代码方式
获取代码方式1:
完整代码已上传我的资源:【运动学】基于matlab Singer模型算法机动目标跟踪【含Matlab源码 1157期】
获取代码方式2:
通过订阅紫极神光博客付费专栏,凭支付凭证,私信博主,可获得此代码。
备注:
订阅紫极神光博客付费专栏,可免费获得1份代码(有效期为订阅日起,三天内有效);
二、部分源代码
%**********利用Singer模型算法对机动目标进行跟踪*************
function [xx5,yy5,ex5,exv5]=singer(T,r,N)
clc
clear
close all
% %***************仿真条件********************
T=2; %雷达扫描周期
r=10000; %量测误差方差
N=50;%Monte Carlo仿真次数
%alpha=1/60;%机动时间常数的倒数,即机动频率
F=[1 T (1/2)*T^2 0 0 0;
0 1 T 0 0 0;
0 0 1 0 0 0;
0 0 0 1 T (1/2)*T^2;
0 0 0 0 1 T;
0 0 0 0 0 1];%状态转移矩阵
H=[1 0 0 0 0 0;
0 0 0 1 0 0];%量测矩阵
sigmax=r;%X方向量测噪声方差
sigmay=r;%Y方向量测噪声方差
R=[sigmax 0;
0 sigmay];%量测噪声协方差
%sigmaax=0.01;%X方向目标加速度方差
%sigmaay=0.01;%Y方向目标加速度方差
qq11=T^5/20;
qq12=T^4/8;
qq13=T^3/6;
qq22=T^3/3;
qq23=T^2/2;
qq33=T;
qq44=T^5/20;
qq45=T^4/8;
qq46=T^3/6;
qq55=T^3/3;
qq56=T^2/2;
qq66=T;
Q=[qq11 qq12 qq13 0 0 0;
qq12 qq22 qq23 0 0 0;
qq13 qq23 qq33 0 0 0;
0 0 0 qq44 qq45 qq46;
0 0 0 qq45 qq55 qq56;
0 0 0 qq46 qq56 qq66];%过程噪声协方差
for j=1:N
[x,y,zx,zy,NN]=target_movement;
load target_movement_out
z=[zx';zy'];
X=[z(1,3) (z(1,3)-z(1,2))/T (z(1,3)-2*z(1,2)+z(1,1))/T^2 z(2,3) (z(2,3)-z(2,2))/T (z(2,3)-2*z(2,2)+z(2,1))/T^2]';%状态向量初始化
%滤波协方差初始化
P11=R(1,1);
P12=R(1,1)/T;
P13=R(1,1)/T^2;
P22=2*R(1,1)/T^2;
P23=3*R(1,1)/T^3;
P33=6*R(1,1)/T^4;
P44=R(2,2);
P45=R(2,2)/T;
P46=R(2,2)/T^2;
P55=2*R(2,2)/T^2;
P56=3*R(2,2)/T^3;
P66=6*R(2,2)/T^4;
P=[P11 P12 P13 0 0 0;
P12 P22 P23 0 0 0;
P13 P23 P33 0 0 0;
0 0 0 P44 P45 P46;
0 0 0 P45 P55 P56;
0 0 0 P46 P56 P66];
MX(:,3)=X;
EX(j,3)=(X(1)-x(3)).^2;%x方向位置初始方差
EXv(j,3)=(X(2)-vvx(3)).^2;%x方向速度初始方差
EY(j,3)=(X(4)-y(3)).^2;%y方向位置初始方差
EYv(j,3)=(X(5)-vvy(3)).^2;%y方向速度初始方差
for i=4:NN
x1=F*X;
z1=H*x1;
P1=F*P*F'+Q;
S=H*P1*H'+R;
v=z(:,i)-z1;
W=P1*H'*inv(S);
X=x1+W*v;
P=P1-W*S*W';
Mv=v'*inv(S)*v;
MX(:,i)=X;
MEX(:,i,j)=MX(:,i);
EX(j,i)=(X(1)-x(i)).^2;%x方向位置初始方差
EXv(j,i)=(X(2)-vvx(i)).^2;%x方向速度初始方差
EY(j,i)=(X(4)-y(i)).^2;%y方向位置初始方差
EYv(j,i)=(X(5)-vvy(i)).^2;%x方向速度初始方差
end
end
function [x,y,zx,zy,NN]=target_movement
%函数定义:生成目标运动的真实值和测量值
% %***************仿真条件*******************************************************
T=2; %雷达扫描周期
r=10000; %量测误差方差
x0=2000;%目标在X轴方向的起始位置
y0=10000;%目标在Y轴方向的起始位置
xv0=0;%目标在X轴方向的起始速度
yv0=-15;%目标在Y轴方向的起始速度
NN=500;%采样点数
x=zeros(NN,1);%X轴位置初始化
y=zeros(NN,1);%Y轴位置初始化
x(1)=x0;%X轴初始位置
y(1)=y0;%Y轴初始位置
vx(1)=xv0;%X轴初始速度
vy(1)=yv0;%Y轴初始速度
for i=1:NN-1
if i<200
ax=0;
ay=0;
vx(i+1)=vx(i)+ax*T;
vy(i+1)=vy(i)+ay*T;
elseif (i>=200)&(i<=300)
ax=15/200;
ay=15/200;
vx(i+1)=vx(i)+ax*T;
vy(i+1)=vy(i)+ay*T;
elseif (i>300)&(i<=500)
ax=0;
ay=0;
vx(i+1)=vx(i)+ax*T;
vy(i+1)=vy(i)+ay*T;
end
x(i+1)=x(i)+vx(i)*T+0.5*ax*T^2+0.5*0*T^2*randn;%X轴的动态方程
y(i+1)=y(i)+vy(i)*T+0.5*ay*T^2+0.5*0*T^2*randn;%Y轴的动态方程
end
%***************产生量测噪声********************
nx=100*randn(NN,1);
ny=100*randn(NN,1);
%***************量测值**************************
zx=x+nx;
zy=y+ny;
vvx=vx;
vvy=vy;
save target_movement_out vvx vvy
%i=1:NN;
%k=4:1:NN;
%l=4:1:NN;
%figure(1)
%plot(x,y,'-dm');
%title('目标运动轨迹')
%xlabel('x方向')
%ylabel('y方向')
%legend('目标运动轨迹')
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
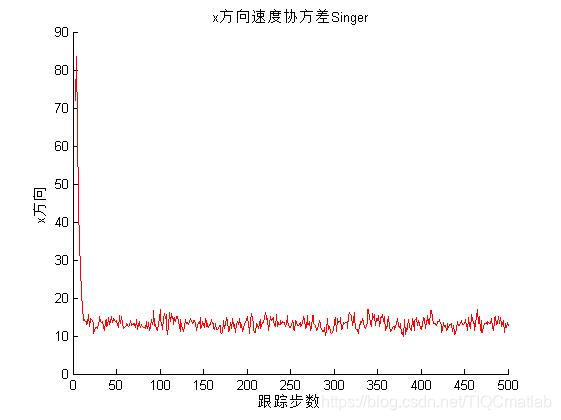
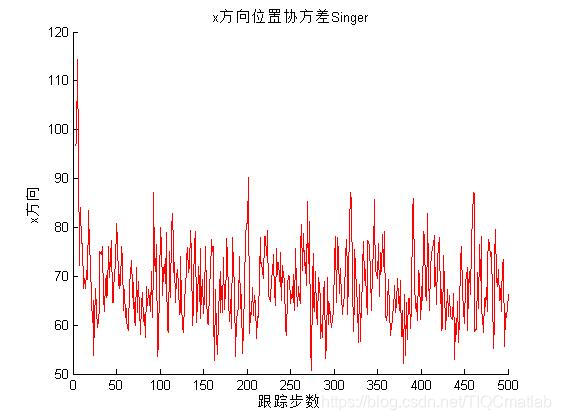
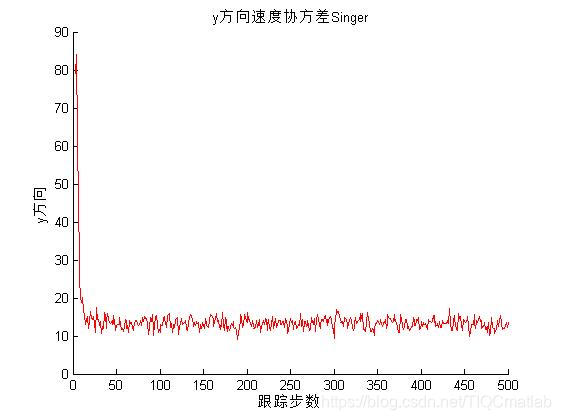
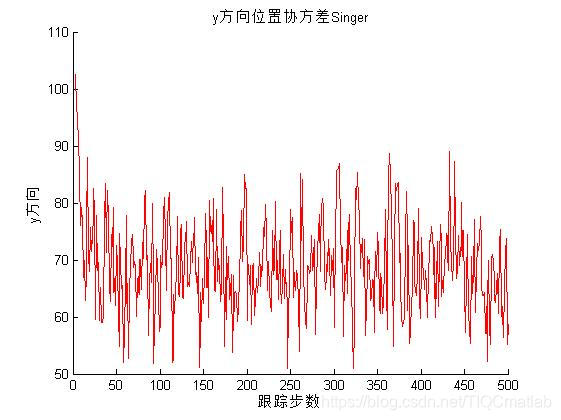
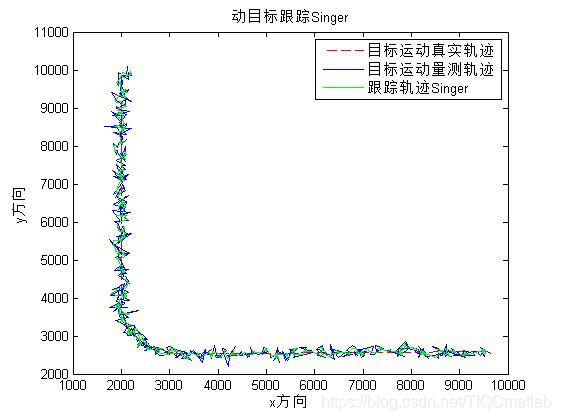
三、运行结果
四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 门云阁.MATLAB物理计算与可视化[M].清华大学出版社,2013.
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/119081554

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)