【LSTM时间序列预测】基于matlab贝叶斯网络优化LSTM时间序列预测【含Matlab源码 1158期】

一、贝叶斯网络及LSTM简介
1 贝叶斯网络
贝叶斯网络(Bayesian network),又称信念网络(Belief Network),或有向无环图模型(directed acyclic graphical model),是一种概率图模型,于1985年由Judea Pearl首先提出。它是一种模拟人类推理过程中因果关系的不确定性处理模型,其网络拓朴结构是一个有向无环图(DAG)。
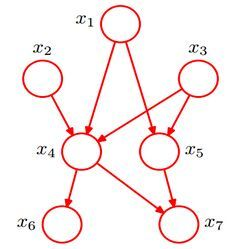
贝叶斯网络的有向无环图中的节点表示随机变量{ X 1 , X 2 , . . . , X n }
它们可以是可观察到的变量,或隐变量、未知参数等。认为有因果关系(或非条件独立)的变量或命题则用箭头来连接。若两个节点间以一个单箭头连接在一起,表示其中一个节点是“因(parents)”,另一个是“果(children)”,两节点就会产生一个条件概率值。
例如,假设节点E直接影响到节点H,即E→H,则用从E指向H的箭头建立结点E到结点H的有向弧(E,H),权值(即连接强度)用条件概率P(H|E)来表示,如下图所示:

简言之,把某个研究系统中涉及的随机变量,根据是否条件独立绘制在一个有向图中,就形成了贝叶斯网络。其主要用来描述随机变量之间的条件依赖,用圈表示随机变量(random variables),用箭头表示条件依赖(conditional dependencies)。
此外,对于任意的随机变量,其联合概率可由各自的局部条件概率分布相乘而得出:

2.4.1 贝叶斯网络的结构形式
(1) head-to-head

依上图,所以有:P(a,b,c) = P(a)*P(b)P(c|a,b)成立,即在c未知的条件下,a、b被阻断(blocked),是独立的,称之为head-to-head条件独立。
(2) tail-to-tail

考虑c未知,跟c已知这两种情况:
在c未知的时候,有:P(a,b,c)=P©P(a|c)P(b|c),此时,没法得出P(a,b) = P(a)P(b),即c未知时,a、b不独立。
在c已知的时候,有:P(a,b|c)=P(a,b,c)/P©,然后将P(a,b,c)=P©P(a|c)P(b|c)带入式子中,得到:P(a,b|c)=P(a,b,c)/P© = P©P(a|c)*P(b|c) / P© = P(a|c)*P(b|c),即c已知时,a、b独立。
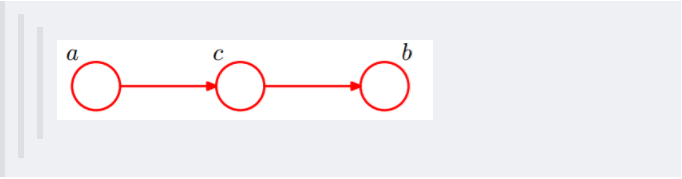
(3)head-to-tail
还是分c未知跟c已知这两种情况:
c未知时,有:P(a,b,c)=P(a)*P(c|a)*P(b|c),但无法推出P(a,b) = P(a)P(b),即c未知时,a、b不独立。
c已知时,有:P(a,b|c)=P(a,b,c)/P©,且根据P(a,c) = P(a)P(c|a) = P©P(a|c),可化简得到:

所以,在c给定的条件下,a,b被阻断(blocked),是独立的,称之为head-to-tail条件独立。
这个head-to-tail其实就是一个链式网络,如下图所示:
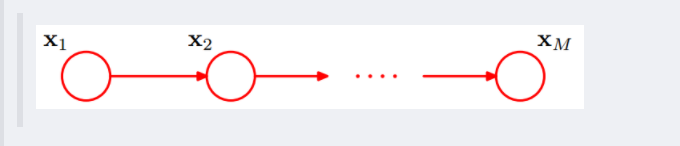
根据之前对head-to-tail的讲解,我们已经知道,在xi给定的条件下,xi+1的分布和x1,x2…xi-1条件独立。意味着啥呢?意味着:xi+1的分布状态只和xi有关,和其他变量条件独立。通俗点说,当前状态只跟上一状态有关,跟上上或上上之前的状态无关。这种顺次演变的随机过程,就叫做马尔科夫链(Markov chain)。对于马尔科夫链我们下一节再细讲。
2 LSTM简介
2.1 LSTM控制流程
LSTM的控制流程:是在前向传播的过程中处理流经细胞的数据,不同之处在于 LSTM 中细胞的结构和运算有所变化。
这一系列运算操作使得 LSTM具有能选择保存信息或遗忘信息的功能。咋一看这些运算操作时可能有点复杂,但没关系下面将带你一步步了解这些运算操作。
2.2 核心概念
LSTM 的核心概念在于细胞状态以及“门”结构。细胞状态相当于信息传输的路径,让信息能在序列连中传递下去。你可以将其看作网络的“记忆”。理论上讲,细胞状态能够将序列处理过程中的相关信息一直传递下去。
因此,即使是较早时间步长的信息也能携带到较后时间步长的细胞中来,这克服了短时记忆的影响。信息的添加和移除我们通过“门”结构来实现,“门”结构在训练过程中会去学习该保存或遗忘哪些信息。
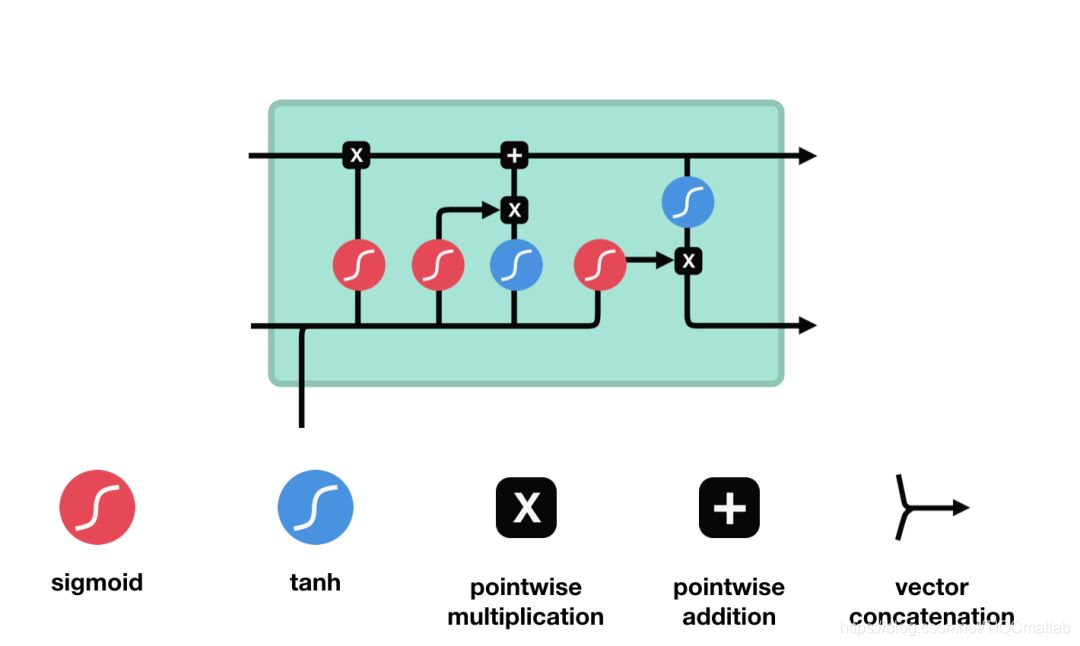
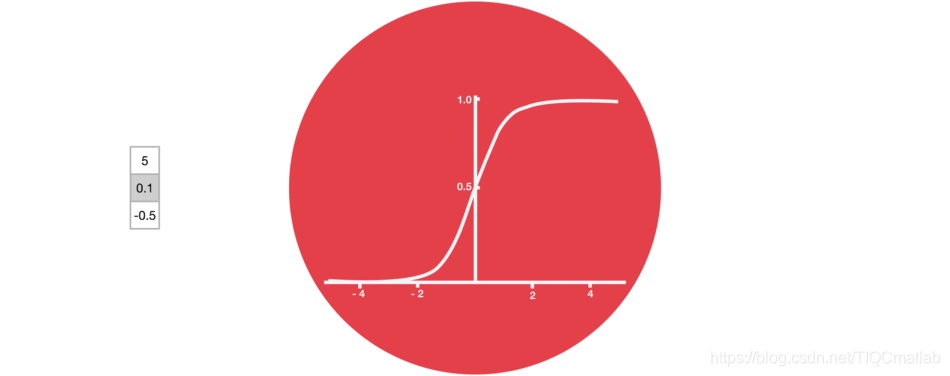
2.3 Sigmoid
门结构中包含着 sigmoid 激活函数。Sigmoid 激活函数与 tanh 函数类似,不同之处在于 sigmoid 是把值压缩到 0~1 之间而不是 -1~1 之间。这样的设置有助于更新或忘记信息,因为任何数乘以 0 都得 0,这部分信息就会剔除掉。同样的,任何数乘以 1 都得到它本身,这部分信息就会完美地保存下来。这样网络就能了解哪些数据是需要遗忘,哪些数据是需要保存。
2.4 LSTM门结构
LSTM 有三种类型的门结构:遗忘门、输入门和输出门。
2.4.1 遗忘门
遗忘门的功能是决定应丢弃或保留哪些信息。来自前一个隐藏状态的信息和当前输入的信息同时传递到 sigmoid 函数中去,输出值介于 0 和 1 之间,越接近 0 意味着越应该丢弃,越接近 1 意味着越应该保留。

2.4.2 输入门
输入门用于更新细胞状态。首先将前一层隐藏状态的信息和当前输入的信息传递到 sigmoid 函数中去。将值调整到 0~1 之间来决定要更新哪些信息。0 表示不重要,1 表示重要。
其次还要将前一层隐藏状态的信息和当前输入的信息传递到 tanh 函数中去,创造一个新的侯选值向量。最后将 sigmoid 的输出值与 tanh 的输出值相乘,sigmoid 的输出值将决定 tanh 的输出值中哪些信息是重要且需要保留下来的。

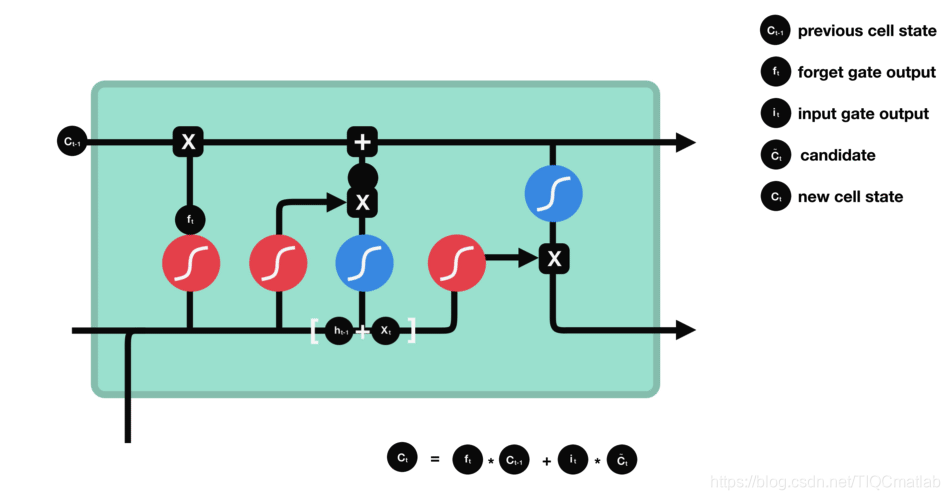
2.4.3 细胞状态
下一步,就是计算细胞状态。首先前一层的细胞状态与遗忘向量逐点相乘。如果它乘以接近 0 的值,意味着在新的细胞状态中,这些信息是需要丢弃掉的。然后再将该值与输入门的输出值逐点相加,将神经网络发现的新信息更新到细胞状态中去。至此,就得到了更新后的细胞状态。
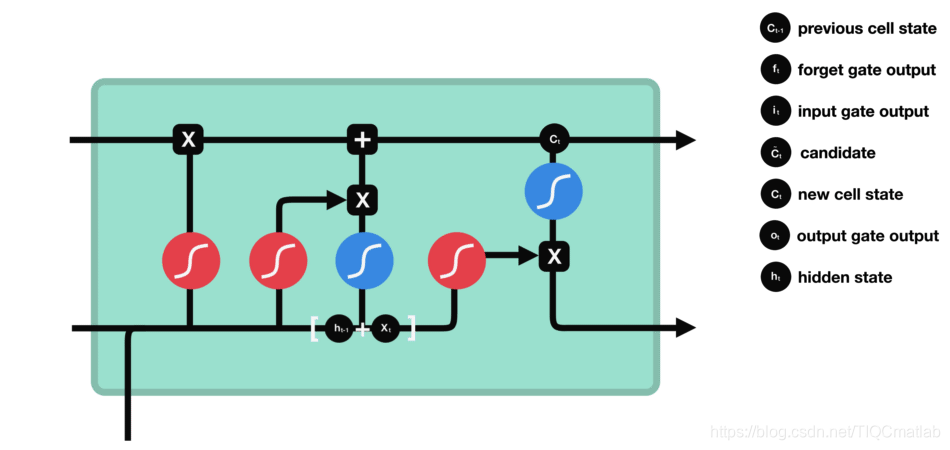
2.4.4 输出门
输出门用来确定下一个隐藏状态的值,隐藏状态包含了先前输入的信息。首先,我们将前一个隐藏状态和当前输入传递到 sigmoid 函数中,然后将新得到的细胞状态传递给 tanh 函数。
最后将 tanh 的输出与 sigmoid 的输出相乘,以确定隐藏状态应携带的信息。再将隐藏状态作为当前细胞的输出,把新的细胞状态和新的隐藏状态传递到下一个时间步长中去。
让我们再梳理一下。遗忘门确定前一个步长中哪些相关的信息需要被保留;输入门确定当前输入中哪些信息是重要的,需要被添加的;输出门确定下一个隐藏状态应该是什么。
二、源代码
%%%%%%%%%% Gaussian Process Regression (GPR) %%%%%%%%%
% Demo: prediction using GPR
% ---------------------------------------------------------------------%
clc
close all
clear all
addpath(genpath(pwd))
% load data
%{
x : training inputs
y : training targets
xt: testing inputs
yt: testing targets
%}
% multiple input-single output
load('./data/data_1.mat')
% Set the mean function, covariance function and likelihood function
% Take meanConst, covRQiso and likGauss as examples
% Initialization of hyperparameters
hyp = struct('mean', 3, 'cov', [0 0 0], 'lik', -1);
% meanfunc = [];
% covfunc = @covSEiso;
% likfunc = @likGauss;
% % Initialization of hyperparameters
% hyp = struct('mean', [], 'cov', [0 0], 'lik', -1);
% Optimization of hyperparameters
hyp2 = minimize(hyp, @gp, -20, @infGaussLik, meanfunc, covfunc, likfunc,x, y);
% Regression using GPR
% yfit is the predicted mean, and ys is the predicted variance
% Visualization of prediction results
plotResult(yt, yfit)
% load data
%{
x : training inputs
y : training targets
xt: testing inputs
yt: testing targets
%}
% multiple input-multiple output
load('./data/data_2.mat')
% Set the mean function, covariance function and likelihood function
% Take meanConst, covRQiso and likGauss as examples
meanfunc = @meanConst;
covfunc = @covRQiso;
likfunc = @likGauss;
% Initialization of hyperparameters
hyp = struct('mean', 3, 'cov', [2 2 2], 'lik', -1);
% meanfunc = [];
% covfunc = @covSEiso;
% likfunc = @likGauss;
%
% hyp = struct('mean', [], 'cov', [0 0], 'lik', -1);
% Optimization of hyperparameters
% Regression using GPR
% yfit is the predicted mean, and ys is the predicted variance
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
三、运行结果






四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 包子阳,余继周,杨杉.智能优化算法及其MATLAB实例(第2版)[M].电子工业出版社,2016.
[2]张岩,吴水根.MATLAB优化算法源代码[M].清华大学出版社,2017.
[3]周品.MATLAB 神经网络设计与应用[M].清华大学出版社,2013.
[4]陈明.MATLAB神经网络原理与实例精解[M].清华大学出版社,2013.
[5]方清城.MATLAB R2016a神经网络设计与应用28个案例分析[M].清华大学出版社,2018.
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/119081645

- 点赞
- 收藏
- 关注作者
评论(0)