【雷达通信】基于matlab联邦滤波算法惯性+GPS+地磁组合导航仿真【含Matlab源码 1276期】

一、联邦滤波算法简介
面对未来大规模无人机集群任务,若采用集中式的信息融合,计算和通信负担重,并且容错性差。而联邦滤波算法作为一种新型的分散化滤波方法,降低了算法的复杂性,提高了算法的容错性与可靠性,而且联邦滤波算法易于实现,信息分配方式灵活,计算量小。
联邦滤波器中,主滤波器与各子滤波器的状态方程相同,如式所示。假设对式进行n次独立的测量,相应的量测方程如式所示。设Xˆg(k|k)和Pg(k|k)为联邦滤波器的最优估计和协方差阵,Xˆi(k|k)和Pi(k|k)为第i个子滤波器的估计值与协方差阵(i=1,2,⋯,n),Xˆm(k|k)和Pm(k|k)为主滤波器的估计值和协方差阵。联邦滤波器的一般结构如图所示。

图 联邦滤波结构框架
联邦滤波器的工作流程分为4个步骤。
步骤1信息分配。系统的信息Q−1(k)和P−1g(k|k)在子滤波器与主滤波器的信息分配原则为
步骤2时间更新。子滤波器与主滤波器的时间更新相互独立,其中i=1,2,⋯,n,m,则时间更新方程为

步骤3量测更新。量测更新只在子滤波器中进行,即i=1,2,⋯,n,则量测更新方程为


步骤4信息融合。将各个局部滤波器的局部估计值进行融合,得到全局最优估计,即
二、部分源代码
% GPS/INS/地磁组合导航,采用联邦滤波算法
clear
R=6378137;
omega=7292115.1467e-11;
g=9.78;
T=14.4;
time=3750;
yinzi1=0.5;
yinzi2=0.5;
%initial value
fai0=30*pi/180;
lamda0=30*pi/180;
vxe0=0.01;
vye0=0.01;
faie0=2.0/60*pi/180;
lamdae0=2.0/60*pi/180;
afae0=3.0/60*pi/180;
beitae0=3.0/60*pi/180;
gamae0=5.0/60*pi/180;
hxjz=pi/4;
vx=20*1852/3600*sin(hxjz);
vy=20*1852/3600*cos(hxjz);
%
weichagps=25;%GPS位置误差
suchagps=0.05;%GPS速度误差
gyroe0=(0.01/3600)*pi/180;
gyrotime=1/7200;%陀螺漂移反向相关时间
atime=1/1800;
gyronoise=(0.001/3600)/180*pi;%陀螺漂移白噪声
beta_d=1/6000.0; %速度偏移误差反向相关时间
beta_drta=1/6000.0; %偏流角误差反向相关时间
%matrix of system equation
fai=fai0;
lamada=lamda0;
zong=0*pi/180;
heng=0*pi/180;
hang=45*pi/180;
F(16,16)=0;
G(16,9)=0;
%initial value
x1(16,1)=0;
%the error of sins
xx=x1;
xx(1)=faie0; %ljn
xx(2)=lamdae0;
xx(5)=afae0;
xx(6)=beitae0;
xx(7)=gamae0;
xx(8)=(0.01/3600)*pi/180;
xx(9)=(0.01/3600)*pi/180;
xx(10)=(0.01/3600)*pi/180;
xx(11)=0.0005;
xx(12)=0.0005;
xx(13)=0.0005;
%w=[gyronoise,gyronoise,gyronoise,gyronoise,gyronoise,gyronoise,g*1e-5,g*1e-5]';
g1=randn(1,time);
g2=randn(1,time);
g3=randn(1,time);
g4=randn(1,time);
g5=randn(1,time);
g6=randn(1,time);
g7=randn(1,time);
g8=randn(1,time);
g9=randn(1,time);
% attitude change matrix
cbn(1,1)=cos(zong)*cos(hang)+sin(zong)*sin(heng)*sin(hang);
cbn(1,2)=-cos(zong)*sin(hang)+sin(zong)*sin(heng)*cos(hang);
cbn(1,3)=-sin(zong)*cos(heng);
cbn(2,1)= cos(heng)*sin(hang);
cbn(2,2)=cos(heng)*cos(hang);
cbn(2,3)=sin(heng);
cbn(3,1)= sin(zong)*cos(hang)-cos(zong)*sin(heng)*sin(hang);
cbn(3,2)=-sin(zong)*sin(hang)-cos(zong)*sin(heng)*cos(hang);
cbn(3,3)=cos(zong)*cos(heng);
F(1,4)=1/R;
F(2,3)=1/(R*cos(fai));
%F(3,1)=2*omega*vx*cos(fai)+vx*vy*sec(fai)^2/R;
F(3,1)=2*omega*vy*cos(fai)+vx*vy*sec(fai)^2/R;
%F(3,3)=vx*tan(fai)/R;
F(3,3)=vy*tan(fai)/R;
F(3,4)=vx*tan(fai)/R+2*omega*sin(fai);
F(3,6)=-g;
%F(4,1)=-(2*omega*vx*cos(fai)+vx^2*sec(fai)^2/R);
F(4,1)=-(2*omega*vx*sin(fai)+vx^2*sec(fai)^2/R);
F(4,3)=-2*(vx*tan(fai)/R+omega*sin(fai));
F(4,5)=g;
%F(4,7)=-g;
F(5,4)=-1/R;
F(5,6)=omega*sin(fai)+vx*tan(fai)/R;
F(5,7)=-(omega*cos(fai)+vx/R);
F(5,8)=1;
F(6,1)=-omega*sin(fai);
%F(6,3)=-1/R;
F(6,3)=1/R;
F(6,5)=-(omega*sin(fai)+vx*tan(fai)/R);
%F(6,7)=-vx/R;
F(6,7)=-vy/R;
F(6,9)=1;
F(7,1)=omega*cos(fai)+vx*sec(fai)^2/R;
F(7,3)=tan(fai)/R;
F(7,5)=omega*cos(fai)+vx/R;
%F(7,6)=vx/R;
F(7,6)=vy/R;
F(7,10)=1;
F(8,8)=-gyrotime;
F(9,9)=-gyrotime;
F(10,10)=-gyrotime;
F(3,11)=cbn(1,1);
F(3,12)=cbn(1,2);
F(3,13)=cbn(1,3);
F(4,11)=cbn(2,1);
F(4,12)=cbn(2,2);
F(4,13)=cbn(2,3);
F(5,8)=cbn(1,1);
F(5,9)=cbn(1,2);
F(5,10)=cbn(1,3);
F(6,8)=cbn(2,1);
F(6,9)=cbn(2,2);
F(6,10)=cbn(2,3);
F(7,8)=cbn(3,1);
F(7,9)=cbn(3,2);
F(7,10)=cbn(3,3);
F(11,11)=-atime;
F
F(16,16)=0;
G=[0,0,0,0,0,0,0,0,0;
0,0,0,0,0,0,0,0,0;
0,0,0,0,0,0,0,0,0;
0,0,0,0,0,0,0,0,0;
0,0,0,0,0,0,0,0,0;
0,0,0,0,0,0,0,0,0;
0,0,0,0,0,0,0,0,0;
1,0,0,0,0,0,0,0,0;
0,1,0,0,0,0,0,0,0;
0,0,1,0,0,0,0,0,0;
0,0,0,1,0,0,0,0,0;
0,0,0,0,1,0,0,0,0;
0,0,0,0,0,1,0,0,0;
0,0,0,0,0,0,1,0,0;
0,0,0,0,0,0,0,1,0;
0,0,0,0,0,0,0,0,1];
[A,B]=c2d(F,G,T);
for i=1:time
w(1,1)=gyronoise*g1(1,i);
w(2,1)=gyronoise*g2(1,i);
w(3,1)=gyronoise*g3(1,i);
w(4,1)=(0.5*g*1e-5)*g4(1,i);
w(5,1)=(0.5*g*1e-5)*g5(1,i);
w(6,1)=(0.5*g*1e-5)*g6(1,i);
w(7,1)=0.005*g7(1,i);
w(8,1)=1/600*pi/180*g8(1,i);
w(9,1)=0.0001*g9(1,i);
xx=A*xx+B*w/T^2;
sins1(1,i)=xx(1,1);
sins1(2,i)=xx(2,1);
sins1(3,i)=xx(3,1);
sins1(4,i)=xx(4,1);
sins1(5,i)=xx(5,1);
sins1(6,i)=xx(6,1);
sins1(7,i)=xx(7,1);
s1(i)=xx(1,1)/pi*180*60;
fai0=30*pi/180;
lamda0=30*pi/180;
vxe0=0.01;
vye0=0.01;
faie0=2*pi/(180*60);
lamdae0=2*pi/(180*60);
afae0=3*pi/(180*60);
beitae0=3*pi/(180*60);
gamae0=5*pi/(180*60);
hxjz=pi/4;
vx=20*1842/3600*sin(hxjz);
vy=20*1842/3600*cos(hxjz);
%vx=0;
%vy=0;
fe=0;
fn=0;
fu=g;
% attitude change matrix
zong=0*pi/180;
heng=0*pi/180;
hang=45*pi/180;
cbn(1,1)=cos(zong)*cos(hang)+sin(zong)*sin(heng)*sin(hang);
cbn(1,2)=-cos(zong)*sin(hang)+sin(zong)*sin(heng)*cos(hang);
cbn(1,3)=-sin(zong)*cos(heng);
cbn(2,1)= cos(heng)*sin(hang);
cbn(2,2)=cos(heng)*cos(hang);
cbn(2,3)=sin(heng);
cbn(3,1)= sin(zong)*cos(hang)-cos(zong)*sin(heng)*sin(hang);
cbn(3,2)=-sin(zong)*sin(hang)-cos(zong)*sin(heng)*cos(hang);
cbn(3,3)=cos(zong)*cos(heng);
%
gpstime=1/600;
weichagps=25;%GPS位置误差
suchagps=0.05;%GPS速度误差
gyroe0=(0.01/3600)*pi/180;
gyrotime=1/7200;%陀螺漂移反向相关时间
atime=1/1800;
gyronoise=(0.01/3600)/180*pi;%陀螺漂移白噪声
tcm2time=1/300;
tcm2noise=0.04*pi/(60*180);
afatcm2=6*pi/(180*60);
betatcm2=6*pi/(180*60);
gamatcm2=6*pi/(180*60);
%matrix of system equation
fai=fai0;
lamada=lamda0;
F(22,22)=0;
F(1,4)=1/R;
F(2,1)=vx*tan(fai)*sec(fai)/R;
F(2,3)=sec(fai)/R;
F(3,1)=2*omega*vx*cos(fai)+vx*vy*sec(fai)^2/R;
F(3,3)=vx*tan(fai)/R;
F(3,4)=vx*tan(fai)/R+2*omega*sin(fai);
F(3,6)=-fu;
F(3,7)=fn;
F(4,1)=-(2*omega*vx*cos(fai)+vx^2*sec(fai)^2/R);
F(4,3)=-2*(vx*tan(fai)/R+omega*sin(fai));
F(4,5)=fu;
F(4,7)=-fe;
F(5,4)=-1/R;
F(5,6)=omega*sin(fai)+vx*tan(fai)/R;
F(5,7)=-(omega*cos(fai)+vx/R);
%F(5,8)=1;
F(6,1)=-omega*sin(fai);
F(6,3)=1/R;
F(6,5)=-(omega*sin(fai)+vx*tan(fai)/R);
F(6,7)=-vx/R;
%F(6,9)=1;
F(7,1)=omega*cos(fai)+vx*sec(fai)^2/R;
F(7,3)=tan(fai)/R;
F(7,5)=omega*cos(fai)+vx/R;
F(7,6)=vx/R;
%F(7,10)=1;
F(5,8)=cbn(1,1);
F(5,9)=cbn(1,2);
F(5,10)=cbn(1,3);
F(5,11)=cbn(1,1);
F(5,12)=cbn(1,2);
Q=[2*gyronoise^2/7200,0,0,0,0,0,0,0,0,0,0,0,0,0,0;
0,2*gyronoise^2/7200,0,0,0,0,0,0,0,0,0,0,0,0,0;
0,0,2*gyronoise^2/7200,0,0,0,0,0,0,0,0,0,0,0,0;
0,0,0,gyronoise^2,0,0,0,0,0,0,0,0,0,0,0;
0,0,0,0,gyronoise^2,0,0,0,0,0,0,0,0,0,0;
0,0,0,0,0,gyronoise^2,0,0,0,0,0,0,0,0,0;
0,0,0,0,0,0,2*5*g*1e-5/1800,0,0,0,0,0,0,0,0;
0,0,0,0,0,0,0,2*5*g*1e-5/1800,0,0,0,0,0,0,0;
0,0,0,0,0,0,0,0,2*(25/R)^2/600,0,0,0,0,0,0;
0,0,0,0,0,0,0,0,0,2*(25/R)^2/600,0,0,0,0,0;
0,0,0,0,0,0,0,0,0,0,2*0.05^2/600,0,0,0,0;
0,0,0,0,0,0,0,0,0,0,0,2*0.05^2/600,0,0,0;
0,0,0,0,0,0,0,0,0,0,0,0,2*tcm2noise^2/300,0,0;
0,0,0,0,0,0,0,0,0,0,0,0,0,2*tcm2noise^2/300,0;
0,0,0,0,0,0,0,0,0,0,0,0,0,0,2*tcm2noise^2/300];
Q1=1/yinzi1*Q;
Q2=1/yinzi2*Q;
r=[(weichagps/R)^2,0,0,0,0,0,0;
0,(weichagps/R)^2,0,0,0,0,0;
0 , 0,suchagps^2,0,0,0,0;
0, 0, 0, suchagps^2,0,0,0;
0,0,0,0,tcm2noise^2,0,0;
0,0,0,0,0,tcm2noise^2,0;
0,0,0,0,0,0,tcm2noise^2];
r1=[(weichagps/R)^2,0,0,0;
0,(weichagps/R)^2,0,0;
0 , 0,suchagps^2,0;
0, 0, 0, suchagps^2];
r2=[tcm2noise^2,0,0;
0,tcm2noise^2,0;
0,0,tcm2noise^2];
%discrete manage
[A,B]=c2d(F,G,T);
r1=r1/T;
r2=r2/T;
Q1=Q1/T;
Q2=Q2/T;
%initial value
p=[faie0^2,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0;
figure(1);
subplot(3,2,1)
plot(t,sg1,'b:')
grid
xlabel('time(h)')
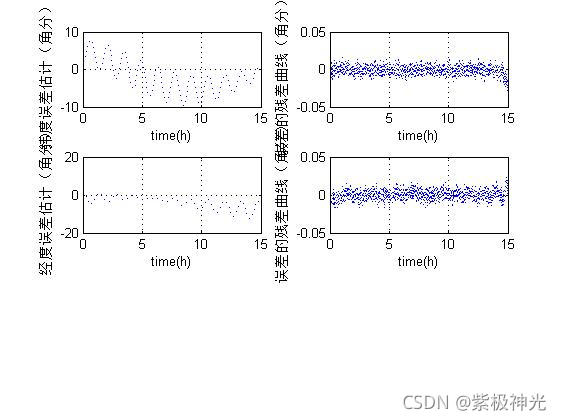
ylabel('纬度误差估计(角分)')
subplot(3,2,2)
plot(t,ss1,'b:')
grid
xlabel('time(h)')
ylabel('误差的残差曲线(角分)')
subplot(3,2,3)
plot(t,sg2 ,'b:')
grid
xlabel('time(h)')
ylabel('经度误差估计(角分)')
subplot(3,2,4)
plot(t,ss2 ,'b:')
grid
xlabel('time(h)')
ylabel('误差的残差曲线(角分)')
set(gcf,'color',[1 1 1])
figure(2);
subplot(3,2,1)
plot(t,sg3,'b:')
grid
xlabel('time(h)')
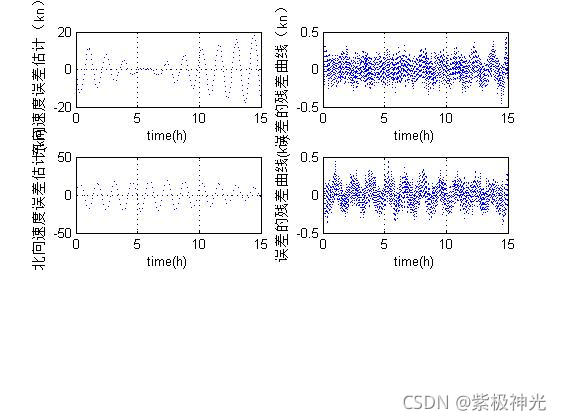
ylabel('东向速度误差估计(kn)')
subplot(3,2,2)
plot(t,ss3,'b:')
grid
xlabel('time(h)')
ylabel('误差的残差曲线(kn)')
subplot(3,2,3)
plot(t,sg4 ,'b:')
grid
xlabel('time(h)')
ylabel('北向速度误差估计(kn)')
subplot(3,2,4)
plot(t,ss4 ,'b:')
grid
xlabel('time(h)')
ylabel('误差的残差曲线(kn)')
set(gcf,'color',[1 1 1])
figure(3);
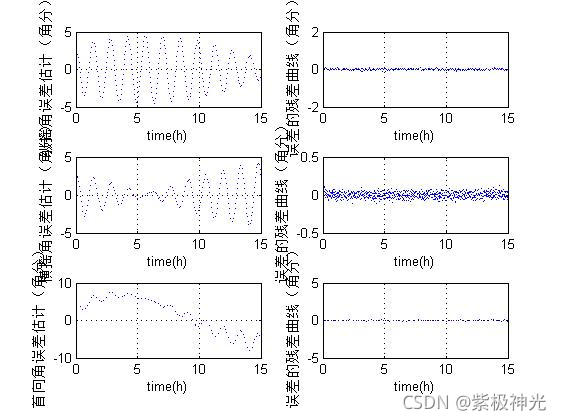
subplot(3,2,1)
plot(t,sg5,'b:')
grid
xlabel('time(h)')
ylabel('纵摇角误差估计(角分)')
subplot(3,2,2)
plot(t,ss5,'b:')
grid
xlabel('time(h)')
ylabel('误差的残差曲线(角分)')
subplot(3,2,3)
plot(t,sg6 ,'b:')
grid
xlabel('time(h)')
ylabel('横摇角误差估计(角分)')
subplot(3,2,4)
plot(t,ss6 ,'b:')
grid
xlabel('time(h)')
ylabel('误差的残差曲线(角分)')
subplot(3,2,5)
plot(t,sg7 ,'b:')
grid
xlabel('time(h)')
ylabel('首向角误差估计(角分)')
subplot(3,2,6)
plot(t,ss7 ,'b:')
grid
xlabel('time(h)')
ylabel('误差的残差曲线(角分)')
set(gcf,'color',[1 1 1])
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
- 418
- 419
- 420
- 421
- 422
三、运行结果
四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 沈再阳.精通MATLAB信号处理[M].清华大学出版社,2015.
[2]高宝建,彭进业,王琳,潘建寿.信号与系统——使用MATLAB分析与实现[M].清华大学出版社,2020.
[3]王文光,魏少明,任欣.信号处理与系统分析的MATLAB实现[M].电子工业出版社,2018.
[4]李树锋.基于完全互补序列的MIMO雷达与5G MIMO通信[M].清华大学出版社.2021
[5]何友,关键.雷达目标检测与恒虚警处理(第二版)[M].清华大学出版社.2011
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/120063881

- 点赞
- 收藏
- 关注作者
评论(0)