【数据融合】基于matlab拓展卡尔曼滤波IMU和GPS数据融合【含Matlab源码 1600期】

【摘要】
一、获取代码方式
获取代码方式1: 完整代码已上传我的资源:【数据融合】基于matlab拓展卡尔曼滤波IMU和GPS数据融合【含Matlab源码 1600期】
获取代码方式2: 通过订阅紫极神光博客付...
一、获取代码方式
获取代码方式1:
完整代码已上传我的资源:【数据融合】基于matlab拓展卡尔曼滤波IMU和GPS数据融合【含Matlab源码 1600期】
获取代码方式2:
通过订阅紫极神光博客付费专栏,凭支付凭证,私信博主,可获得此代码。
备注:订阅紫极神光博客付费专栏,可免费获得1份代码(有效期为订阅日起,三天内有效);
二、部分源代码
%for testing
clc
clear
close all
pauseLen = 0;
%%Initializations
%TODO: load data here
data = load('lib/IMU_GPS_GT_data.mat');
IMUData = data.imu;
GPSData = data.gpsAGL;
gt = data.gt;
addpath([cd, filesep, 'lib'])
initialStateMean = eye(5);
initialStateCov = eye(9);
deltaT = 1 / 30; %hope this doesn't cause floating point problems
numSteps = 500000;%TODO largest timestamp in GPS file, divided by deltaT, cast to int
results = zeros(7, numSteps);
% time x y z Rx Ry Rz
% sys = system_initialization(deltaT);
Q = blkdiag(eye(3)*(0.35)^2, eye(3)*(0.015)^2, zeros(3));
%IMU noise characteristics
%Using default values from pixhawk px4 controller
%https://dev.px4.io/v1.9.0/en/advanced/parameter_reference.html
%accel: first three values, (m/s^2)^2
%gyro: next three values, (rad/s)^2
filter = filter_initialization(initialStateMean, initialStateCov, Q);
%IMU noise? do in filter initialization
IMUIdx = 1;
GPSIdx = 1;
nextIMU = IMUData(IMUIdx, :); %first IMU measurement
nextGPS = GPSData(GPSIdx, :); %first GPS measurement
%plot ground truth, raw GPS data
% plot ground truth positions
plot3(gt(:,2), gt(:,3), gt(:,4), '.g')
grid on
hold on
% plot gps positions
% plot3(GPSData(:,2), GPSData(:,3), GPSData(:,4), '.b')
axis equal
axis vis3d
counter = 0;
MAXIGPS = 2708;
MAXIIMU = 27050;
isStart = false;
for t = 1:numSteps
currT = t * deltaT;
if(currT >= nextIMU(1)) %if the next IMU measurement has happened
% disp('prediction')
filter.prediction(nextIMU(2:7));
isStart = true;
IMUIdx = IMUIdx + 1;
nextIMU = IMUData(IMUIdx, :);
% plot3(filter.mu(1, 5), filter.mu(2, 5), filter.mu(3, 5), 'or');
end
if(currT >= nextGPS(1) & isStart) %if the next GPS measurement has happened
% disp('correction')
counter = counter + 1;
filter.correction(nextGPS(2:4));
GPSIdx = GPSIdx + 1;
nextGPS = GPSData(GPSIdx, :);
plot3(nextGPS(2), nextGPS(3), nextGPS(4), '.r');
% plot3(filter.mu(1, 5), filter.mu(2, 5), filter.mu(3, 5), 'ok');
% plotPose(filter.mu(1:3, 1:3), filter.mu(1:3, 5), filter.mu(1:3,4));
end
results(1, t) = currT;
results(2:4, t) = filter.mu(1:3, 5); %just position so far
% plot3(results(2, t), results(3, t), results(4, t), 'or');
% disp(filter.mu(1:3, 1:3));
if pauseLen == inf
pause;
elseif pauseLen > 0
pause(pauseLen);
end
if IMUIdx >= MAXIIMU || GPSIdx >= MAXIGPS
break
end
end
plot3(results(2,:), results(3,:), results(4,:), '.b');
% xlim([-10 10]);
% ylim([-10 10]);
xlabel('x, m');
ylabel('y, m');
zlabel('z, m');
%% Evaluation
gps_score = evaluation(gt, GPSData)
results_eval = results.';
score = 0;
estimation_idx = 1;
count = 0;
for i = 2:length(gt)
score = score + norm(gt(i, 2:4) - results_eval(30 * (i-1), 2:4)) ^ 2;
count = count + 1;
end
count
score = sqrt(score / count)
%% Function
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
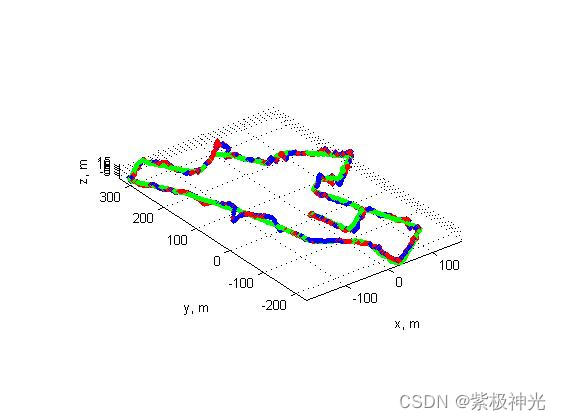
三、运行结果
四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 沈再阳.精通MATLAB信号处理[M].清华大学出版社,2015.
[2]高宝建,彭进业,王琳,潘建寿.信号与系统——使用MATLAB分析与实现[M].清华大学出版社,2020.
[3]王文光,魏少明,任欣.信号处理与系统分析的MATLAB实现[M].电子工业出版社,2018.
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/121943241

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)