【目标定位】基于matlab扩展卡尔曼算法SLAM(运动轨迹+误差 )【含Matlab源码 1637期】

【摘要】
一、获取代码方式
获取代码方式1: 完整代码已上传我的资源: 【目标定位】基于matlab扩展卡尔曼算法SLAM(运动轨迹+误差 )【含Matlab源码 1637期】
获取代码方式2: 通过订阅紫极神...
一、获取代码方式
获取代码方式1:
完整代码已上传我的资源: 【目标定位】基于matlab扩展卡尔曼算法SLAM(运动轨迹+误差 )【含Matlab源码 1637期】
获取代码方式2:
通过订阅紫极神光博客付费专栏,凭支付凭证,私信博主,可获得此代码。
备注:订阅紫极神光博客付费专栏,可免费获得1份代码(有效期为订阅日起,三天内有效);
二、EKF-SLAM步骤简介
1 运动更新
运动更新时,固定点坐标不变,所以只需要根据运动方程更新(x,y,α)及其协方差与互协方差即可。
2 观测到曾经观测过的固定点
这时候依次对观测到的特征点信息进行EKF更新
Landmark observations are processed in the EKF usually one-by-one
- 1
3 观测到新的固定点
这时候观测到新的固定点,需要进行状态增广。根据逆观测方程,使用观测信息推测出新加的增广状态均值与方差,然后加入到总体的状态与协方差矩阵中。
三、部分源代码
% I. 初始化
%
disp('EKF-2D-SLAM sample program start!!')
% 运动噪声
q = [0.01;0.01];
Q = diag(q.^2);
% 测量噪声
m = [.15; 1*pi/180];
M = diag(m.^2);
% R: 机器人初始位置
% u: 控制量
R = [0;-2.2;0];
u = [0.1;0.05];
% 设置外界路标点环境
% 环形摆放的landmarks
% W: 设置所有路标点位置
jiaodu_perLandMark =6; %取1,3,6,15,30,60...(360的倍数均可)
r1=2;
r2=3;
r3=3.5;
W = landmarks(r1,r2,r3,jiaodu_perLandMark);
% 传感器探测半径
sensor_r = 2.5;
% Id容器用来判别当前探测到的路标点曾经是否被观测过;若没有观测过,那么此时需要将其加入Id容器。
% 这里使用W中每个点的索引作为路标点的id;Id初始化为一个足够大的零数组即可。
% Id(类型)==1,表示曾经观测过;Id(类型)==0,表示曾经没有观测过。
% 如果用c++实现,建议使用map结构。
Id = zeros(1,size(W,2));
% y_news表示当前新探测到的路标点,y_news(:,i)记录观测量和路标点类型
% 同理y_olds
y_olds = zeros(3,size(W,2));
y_news = zeros(3,size(W,2));
% 状态量及协方差初始化
x = zeros(numel(R)+numel(W), 1);
P = zeros(numel(x),numel(x));
% id_to_x_map:id------>>>id对应的状态变量在x中的位置
id_to_x_map = zeros(1,size(W,2));
% x和P初始化
r = [1 2 3];
x(r) = R;
%x(r) = [8;-2.5;0];
P(r,r) = 0;
% 每次状态增广在x中的位置
s = [4 5];
%主循环次数
% 125/每圈
loop =250;
% 存放位姿仿真量
poses_ = zeros(3,loop);
% 存放位姿历史估计量
poses = zeros(3,loop);
% 绘图
mapFig = figure(1);
cla;
axis([-5 5 -5 5])
axis square
%axis equal
% 所有路标点
WG = line('parent',gca,...
'linestyle','none',...
'marker','.',...
'color','m',...
'xdata',W(1,:),...
'ydata',W(2,:));
% 仿真下机器人位置
RG = line('parent',gca,...
'marker','+',...
'color','r',...
'xdata',R(1),...
'ydata',R(2));
% 估计的机器人位置
rG = line('parent',gca,...
'linestyle','none',...
'marker','+',...
'color','b',...
'xdata',x(r(1)),...
'ydata',x(r(2)));
% 估计的路标点位置
lG = line('parent',gca,...
'linestyle','none',...
'marker','+',...
'color','k',...
'xdata',[],...
'ydata',[]);
% 估计的路标点协方差
eG1 = zeros(1,size(W,2));
for i = 1:numel(eG1)
eG1(i) = line(...
'parent', gca,...
'color','k',...
'xdata',[],...
'ydata',[]);
end
% 估计的机器人位置
reG = line(...
'parent', gca,...
'color','r',...
'xdata',[],...
'ydata',[]);
% 传感器探测范围(以真实位置为圆心)
sensor1 = line(...
'parent', gca,...
'color','m',...
'xdata',[],...
'ydata',[],...
'LineStyle','--');
sensor2 = line(...
'parent', gca,...
'color','m',...
'xdata',[],...
'ydata',[],...
'LineStyle','--');
%传感器探测范围(以估计位置为圆心)
Sensor1 = line(...
'parent', gca,...
'color','m',...
'xdata',[],...
'ydata',[],...
'LineStyle','--');
Sensor2 = line(...
'parent', gca,...
'color','m',...
'xdata',[],...
'ydata',[],...
'LineStyle','--');
true_pose = line(...
'parent', gca,...
'color','r',...
'xdata',[],...
'ydata',[],...
'LineWidth',0.8);
%'LineStyle','--');
estimate_pose = line(...
'parent', gca,...
'color','b',...
'xdata',[],...
'ydata',[],...
'LineWidth',0.8);
% 'LineStyle','--');
% II. 主循环;
% 机器人每前进一步,循环一次
for t = 1:loop
% if t == 125
% u(1) = 0.2;
% sensor_r = 4;
% end
% if t == 375
% u(1) = 0.2;
% sensor_r = 5;
% end
%不同探测半径
% if t == 200
% sensor_r = 1;
% end
% if t == 400
% sensor_r =1.5;
% end
% if t == 600
% sensor_r =2;
% end
% if t == 800
% sensor_r =2.5;
% end
% if t == 1000
% sensor_r = 3;
% end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
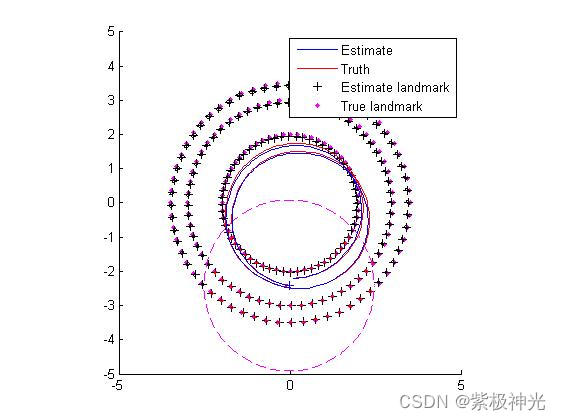
四、运行结果
五、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 沈再阳.精通MATLAB信号处理[M].清华大学出版社,2015.
[2]高宝建,彭进业,王琳,潘建寿.信号与系统——使用MATLAB分析与实现[M].清华大学出版社,2020.
[3]王文光,魏少明,任欣.信号处理与系统分析的MATLAB实现[M].电子工业出版社,2018.
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/122139363

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)