【交通标志识别】基于matlab Hog+SVM路标检测与识别【含Matlab源码 1715期】

一、SVM路标检测识别简介
1 路标识别
完整的路标识别系统包括:图像的获取与预处理,图像分割(路标定位),特征提取,模式分类(路标识别)等部分。其中模式分类是系统的关键技术。较常用的模式分类方法是神经网络分类器。神经网络是目前应用最广也是最成功的学习算法之一,具有较强的容错行和自适应学习能力。然而神经网络采用的经验风险最小化准则(empirical risk minimization, ERM),虽然可使训练误差最小化,但并不能最小化学习过程的泛化误差。实际应用中神经网络常出现的问题:1) 更易出现局部最小值;2) 其输出的假设规模经常可能大到不切实际;3) 如果训练样本的数目有限,过大的假设函数类将导致过拟合;4) 常受到大量参数的控制,参数的选择往往是通过启发式的参数调节过程。
2 支持向量机
2.1 两类模式问题
SVM基于SRM准则构造最优超平面,使每类数据之间间隔最大,同时保持分类误差尽可能小。Cover定理指出:一个复杂的模式识别分类问题,在高维空间比低维空间更容易线性可分。实际上SVM实现了这样的思想:通过某种非线性映射(可以是未知的)将样本特征向量x映射到一个高维特征空间,然后在这个空间中构造最优分类超平面。
对简单的两模式分类,SVM算法可归结为:
通过非线性变换φ:x→φ (x) ,将模式数据映射到高维特征空间,构造分类超平面,表示为决策面:

考虑到两类样本离决策面都应有一定距离,决策面应满足不等式约束,如图1
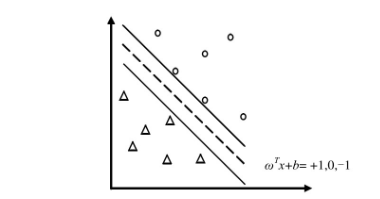
图1 线性可分类超平面与分类间距

完全满足式 (2) 的超平面是不存在的。考虑到存在一些样本不能被决策面正确分类,引入松弛变量ξi (≥0) ,约束条件式 (2) 变为:

满足要求的超平面不止一个,寻找最优超平面可以归结为二次规划问题:

其中,C被称为惩罚因子,通过C可在分类器的泛化能力和误分率之间进行折衷。利用拉格朗日函数求解可得优化问题式 (4) 的对偶形式为:

约束条件为:

求解式 (5) ,可得到αi,代入式 (7) 可以确定ω,分类函数可表示为:

2.2 多类模式的选择
常用的多类模式的SVM方法有one-against-all、one-against-one、DAGSVM
在one-against-all方法中,一个k类问题被分解为k个 (子) 两类问题。第i个两类问题训练集包含原训练集中的所有样本,来自第i类样本的类标被重新定义为+1,其余样本的类标被重新定义为-1
one-against-one方法将一个k类问题分解为k (k-1) /2个 (子) 两类问题。每个两类问题的训练集由原训练集中的2个类别的样本组成,其中一个类别的样本的类标被重新定义为+1,另一个类别的样本的类标被重新定义为-1
有向无环图支持向量机(Directed Acyclic Graph Support Vector Machines, DAGSVM)将所有的两类支持向量机组合为一个二叉有向无环图。对于一个k类问题,这种方法将产生一个包含k个叶结点和k (k-1) /2个中间结点的三角形,叶结点对应着样本类别,中间结点对应着所有的两类分类器。
3 基于SVM的路标识别系统
3.1 图标提取
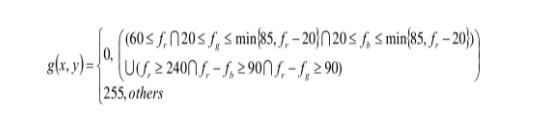
系统从移动机器人的图像采集卡获取路标彩色图像后,首先对源图像进行基于RGB空间模型的路标颜色初次分割,如图2 (b) 。针对光照的影响,考虑到分割的精度和灵敏度,经大量图像进行统计,确定相符的分割改进模型为:
- 红色路标的分割模型

- 黄色路标的分割模型
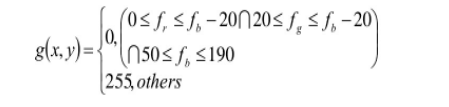
- 蓝色路标的分割模型
其中,fr、fg、fb分别为图像像素点对应的红色、绿色、蓝色分量值。在彩色路标的初次分割之后,用基于当前最大聚合中心的区域生长算法和轮廓跟踪算法确定路标区域。再用双向区域填充算法的方法提取出路标图像的灰度信息图,如图2 © 。然后,进行直方图分割后的特征的提取,如图2 (d) ,得到32*32像素的特征样本。

最后,将提取到的特征样本送入SVM分类器,进行路标样本的训练和识别。
二、部分源代码
%%
%%模式选择和初始值确定
Mode=input('Please input mode:\n1.training;\n2.testing\n');
%设置图片的统一大小,当图像不是规范尺寸时,使用resize来重新
imgHeight=64;
imgWidth=64;
cellWidth=5;
cellHeight=5;
useGray=1;
% % Mode=1 training
% % Mode=2 testing/predicting
%%
%提取HOG特征部分
%%读取图像
[images,img_num]=GetPic(Mode,imgHeight,imgWidth,useGray);
%%为最后的所有的HOG特征分配空间
HOGs=zeros((floor(imgHeight/cellHeight)-1)*(floor(imgWidth/cellHeight)-1)*36,5);
%%使用MATLAB工具库中的提取HOG特征的函数
%%第一步:生成一个与训练图片一样尺寸的图片
%%第二部:模拟生成一个HOG特征
%%第三部:利用虚拟的特征来为后面的特征分配空间
scaleImage=zeros(imgHeight,imgWidth,size(images,3));
[features, visualization] = extractHOGFeatures(scaleImage);
HOGs1=zeros(size(features,2),img_num);
%提取HOG特征,包括求梯度,求HOG,归一化,综合
for i=1:size(images,4)
[ GradientMagnitude,GradientDirection ] = GetGradient( images(:,:,:,i));
[HOG]= GetHoG( GradientMagnitude,GradientDirection,cellWidth,cellHeight);
[normHOG]=HOGnormalization(HOG);
[HOGconb]=CombineHOG(normHOG);
HOGs(:,i)=HOGconb;
HOGs1(:,i)=extractHOGFeatures(images(:,:,:,i))';
end
%%
imgHeight=192;
imgWidth=192;
%提取HOG特征部分
%%读取图像
[images,img_num]=GetPic(Mode,imgHeight,imgWidth,0);
scaleImage=zeros(imgHeight,imgWidth,size(images,3));
[features, visualization] = extractHOGFeatures(scaleImage);
HOGs1=zeros(size(features,2),img_num);
for i=1:size(images,4)
HOGs1(:,i)=extractHOGFeatures(images(:,:,:,i))';
end
%%
%%按照Mode确定是训练还是预测
if Mode==1
%%按照读取的顺序,给图片贴标签
% 1:前方右转弯
% 2:限速40
% 3:禁止通行
% 4:禁止左转弯
% 5:禁止右转弯
labels=[1,2,3,4,5];%img_path_list.Labels
% 开始svm多分类训练,注意:fitcsvm用于二分类,fitcecoc用于多分类,1 VS 1方法
classifer = fitcecoc(HOGs',labels);
classifer2 = fitcecoc(HOGs1',labels);
%保存训练结果用于下次使用
save classifer classifer;
save classifer2 classifer2;
else
close all;
%读取已经存储的训练结果
clsf=load('classifer.mat')
classifer=clsf.classifer;
clsf2=load('classifer2.mat')
classifer2=clsf2.classifer2;
%为预测标签飞陪空间
Labels=zeros(size(HOGs,2),1);
for i=1:size(HOGs,2)
%利用标签进行预测
[predictIndex,score] = predict(classifer,HOGs(:,i)');
if predictIndex==5
[predictIndex1,score] = predict(classifer2,HOGs1(:,i)');
if predictIndex1==1
Labels(i)=predictIndex1;
else
Labels(i)=predictIndex;
end
else
% Labels(i)=PredictLable(HOGs(i),TrainingResults.HOGs);
Labels(i)=predictIndex;
end
end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
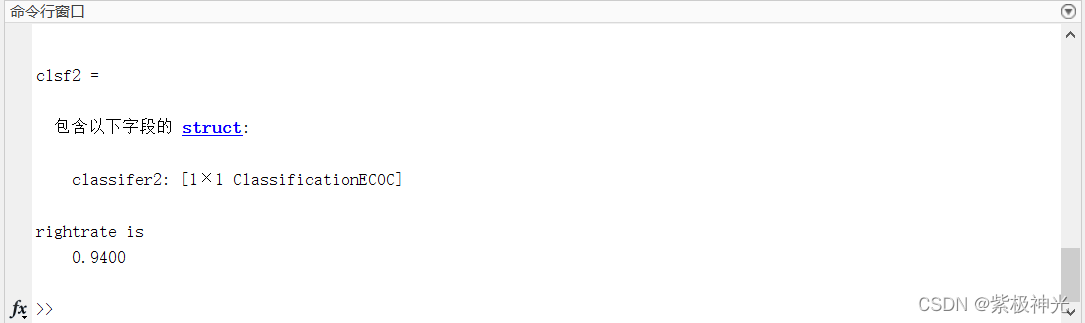
三、运行结果


四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 蔡利梅.MATLAB图像处理——理论、算法与实例分析[M].清华大学出版社,2020.
[2]杨丹,赵海滨,龙哲.MATLAB图像处理实例详解[M].清华大学出版社,2013.
[3]周品.MATLAB图像处理与图形用户界面设计[M].清华大学出版社,2013.
[4]刘成龙.精通MATLAB图像处理[M].清华大学出版社,2015.
[5]易东,黄玉清.基于SVM的移动机器人路标识别算法[J].兵工自动化. 2009,28(08)
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/123006075

- 点赞
- 收藏
- 关注作者
评论(0)