【手势识别】基于matlab GUI SIFT+SVM算法手势识别【含Matlab源码 1789期】

一、手势识别简介
1 引言
人机交互技术, 就是利用计算机的输入、输出模块, 用有效的方式实现人与计算机的交流。随着科技的发展, 人们逐渐不满足与传统的输入输出方式, 而是向往通过与计算机直接互动的方式完成人机交互。将手势识别运用到人机交互的方式当中, 不仅完成了与人计算机的互动和交流, 也是一种更加简单、轻松的人机交互方式。
近年来随着人工智能的兴起, 也让手势识别的发展越来越迅速, 手势识别的应用也越来越广泛, 例如利用手势播放PPT、控制电视机等方面逐步呈现在大家面前。
2 算法实现
当前手势识别技术包括个核心部分:手势跟踪、手势分割、特征提取和手势识别。
2.1 基于肤色检测的手势分割
肤色检测, 就是在图像中选取与皮肤颜色相近的像素。其中, 基于颜色的方法, 由于算法简单、实时性高、对形变等具有较强的鲁棒性, 被广泛研究应用。常用的肤色检测算法已经被广泛研究, 例如基于YCrCb颜色空间的肤色检测算法, 该算法将空间中的亮度和色度完全分离开来, 作为两个完全独立的变量, 不会相互混淆。“Y”做为亮度变量, “Cr”和“Cb”分别作为色度的变量。YCrCb颜色空间对颜色的提取和人的眼睛甚是类似, 色彩的分布过渡均匀。YCrCb颜色空间将亮度变量和两个色度变量区分开来, 使得YCrCb颜色空间中对肤色提取和识别将对光线只受到很小很小的影响。通过采集和提取大量的肤色模型, 并将其在YCrCb颜色空间的分布投影到CrCb平面, 发现其在Cr和Cb分量上样本可近似聚合为一个椭圆, 当像素点的色度分量Cb、Cr的值落在椭圆内部或这边界时, 该像素点可以认定为肤色。此方法优点在于彻底分离了色度和亮度, 能够在CrCb平面建立肤色椭圆模型, 表明肤色聚合性好, 并能对颜色空间进行降维处理, 便于计算和应用。利用肤色椭圆模型进行肤色检测, 由于该模型受光线、亮度的影响较小, 其肤色检测效果较好。
2.2 手势跟踪
手势跟踪是动态手势特征提取的前提, 对手势识别系统的效率有重要的影响。手势跟踪获取的是手势位置和运动趋势信息, 是在手势的视频序列中, 利用己获取的信息计算得到的。如何定义和表达运动目标, 直接影响到算法的精度以及鲁棒性, 而算法的实时性则受匹配搜索方法和滤波算法影响。
2.3 基于PCA算法的特征提取
手势图像的特征向量, 由一组描述对象特性的参数组成。如何选择合适的特征参数是手势识别的最关键部分。为了获得较好的特征参数, 在确定出手势位置之后, 需要对该手势的一些基本参数, 如特征的位置、大小以及方向等进行测定, 以保证所用参数的准确性。在提取到这些特征之后, 还要通过大量的训练来进行参数优化。目前, 常用的图像特征包括二值影像、手势形状信息 (区域、轮廓、骨架等) , 手势形状几何属性 (距离、面积、长短、凹凸等) 、指尖等。主成分分析 (Principal Component Analysis) , 简称PCA, 是一种常用的特征提取方法, 它也被称为Karhunen-Loève变换。经过变换后可以有效的降低维数, 又能保留有效的识别信息, 这些有效的信息构成一组特征图像例如PCA一个简易的投影, 假设有很多小方块代表着我们的数据在二维空间中的分布。那我们需要将小方块投影到一条L所在的直线方向, 不仅它保留了原数据的所有信息, 而且还让数据从二维降到了一维。这就是PCA方法的优点。
2.4 基于SVM算法的手势识别
手势识别包括分类和识别两个过程, 是将从图片序列中获得的轨迹 (或点) , 分类到模型参数空间里某个子集, 从而进行识别。因为PCA自身不具有分类能力, 所以通过PCA算法提取特征向量后, 需要利用分类器根据样本的特征向量进行分类处理, 以判别当前手势的含义。分类器的工作分两步:训练和测试。先对样本进行学习, 将样本进行预判别, 将提取的特征向量进行学习和分类, 将类分好后, 再将测试对象经过分类器即可将测试对象进行分类判别, 对于本实验来说, 也就实现了手势识别。支持向量机 (Support Vector Machine, SVM) 是一种二分类模型, 其求解目标在于确定一个分类的超平面, 以最大化特征空间上的间隔。分类超平面的确定只取决于少数的样本信息, 这些关键的样本被称之为支持向量Support Vector, 这也是SVM—支持向量机名称的由来。例如一个简单的两类线性可分的分类。分布着两类数据。一类是正方形所代表的数据, 它们的类别是1, 另一类是圆形所代表的数据, 它们的类别是-1。我们可以从中找到很多条能分隔开这两类数据的线, 支持向量机的目的就是要从这么多的线中找出一条使得两类样本之间的间隔最大的线。
二、部分源代码
function varargout = shibie(varargin)
% SHIBIE MATLAB code for shibie.fig
% SHIBIE, by itself, creates a new SHIBIE or raises the existing
% singleton*.
%
% H = SHIBIE returns the handle to a new SHIBIE or the handle to
% the existing singleton*.
%
% SHIBIE('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in SHIBIE.M with the given input arguments.
%
% SHIBIE('Property','Value',...) creates a new SHIBIE or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before shibie_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to shibie_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help shibie
% Last Modified by GUIDE v2.5 13-Oct-2021 00:11:32
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @shibie_OpeningFcn, ...
'gui_OutputFcn', @shibie_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before shibie is made visible.
function shibie_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to shibie (see VARARGIN)
%%
set(handles.text3,'Visible','off');
set(handles.text4,'Visible','off');
set(handles.text5,'Visible','off');
set(handles.text8,'Visible','off');
set(handles.text1,'Visible','off');
set(handles.uipanel4,'Visible','off');
% Choose default command line output for shibie
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes shibie wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = shibie_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% --- Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
%%
set(handles.text3,'Visible','off');
set(handles.text4,'Visible','off');
set(handles.text5,'Visible','off');
set(handles.text8,'Visible','off');
set(handles.text1,'Visible','off');
set(handles.uipanel4,'Visible','off');
[Filename,Pathname]=uigetfile(...
{'*.pgm';'*.ppm'},'选择图片');
str=[Pathname Filename];
handles.picturepath=str;
guidata(hObject, handles);
if (Filename~=0)
im=imread(str);
axes(handles.axes1);
imshow(im);
else
clear;
end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
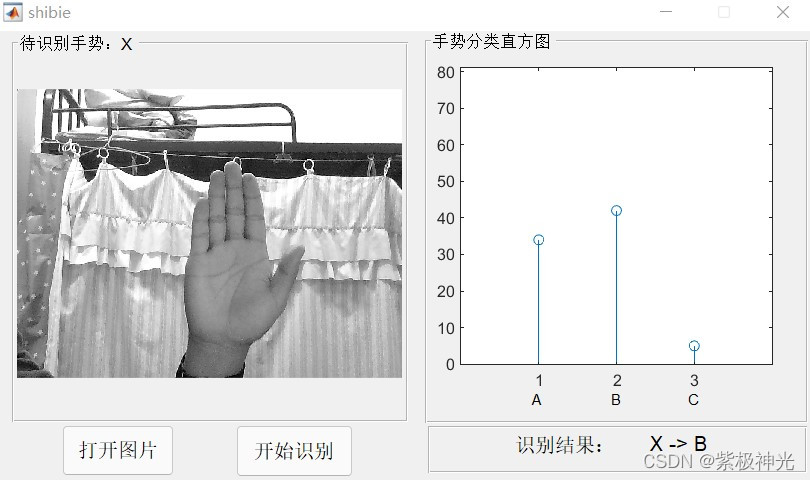
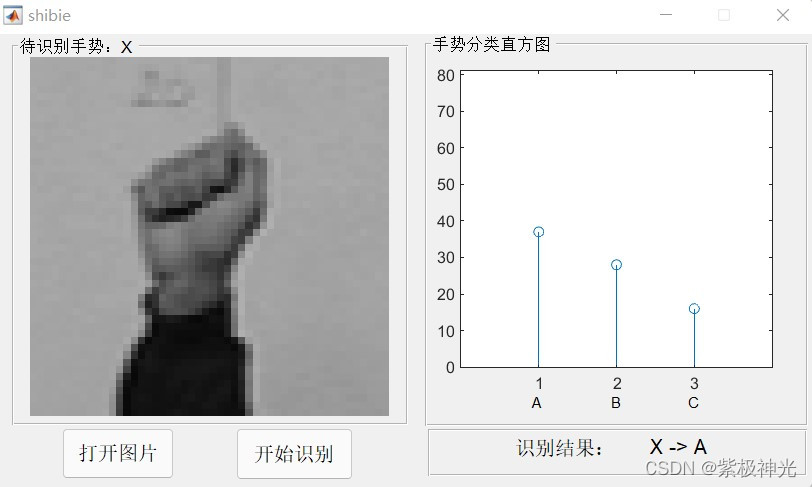
三、运行结果
四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 蔡利梅.MATLAB图像处理——理论、算法与实例分析[M].清华大学出版社,2020.
[2]杨丹,赵海滨,龙哲.MATLAB图像处理实例详解[M].清华大学出版社,2013.
[3]周品.MATLAB图像处理与图形用户界面设计[M].清华大学出版社,2013.
[4]刘成龙.精通MATLAB图像处理[M].清华大学出版社,2015.
[5]黄彦铭,宁媛.基于视觉的手势识别算法及应用的研究[J].智能计算机与应用. 2021,11(06)
[6]孙鹏.基于pca+svm算法实现手势识别[J].中国新通信. 2019,21(07)
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/123632292

- 点赞
- 收藏
- 关注作者
评论(0)