【缺陷检测】基于matlab GUI计算机视觉缺陷检测系统【含Matlab源码 1845期】

一、形态学缺陷检测简介
1 图像分析及预处理
拍摄图像会产生随机的扰动,图像有一定的噪声,为消除掉图像中的无关信息,对图像进行预处理。
1.1 灰度化
为降低运算量,需要将拍摄的三通道的RGB图像转化为单通道的灰度图像。采用加权平均法的灰度化方法,其中心理学灰度公式根据人眼对RGB三色的敏感程度选择不同的权重:

式(1)中,R、G、B分别为RGB三通道灰度值,灰度化结果如图1 (a)所示。
1.2 平滑处理
为了尽可能避免将背景当作缺陷,需要对图像进行平滑处理,这样虽然会使缺陷的边界模糊,但是有利于减少背景的干扰。注意所采用的去噪处理为均值滤波,均值滤波公式为:

式(2)中,m、n分别为所选择的滤波核的长和宽,Sxy是以(x,y)为中心的滤波核对应像素的位置集合,平滑处理结果如图1 (b)所示。均值滤波的缺点是会使一些细节如边缘等信息丢失,因此在找到种子点后,对没有经过平滑处理的图像进行区域生长,找到缺陷边界。
2 算法原理
2.1 阈值分割
阈值分割是图像分割中最简单、基础的方法,性能比较稳定,计算量较小,运算速度快;它主要有全局阈值分割、局部阈值分割、自适应阈值分割等方法。阈值算法基于阈值T,将像素灰度值大于阈值T和小于阈值T的部分分别叫做前景和背景。变换函数表达式:
图1 均值滤波处理

式(3)中,T为阈值,g (x,y)为原图像像素点(x,y)的灰度值,f (x,y)为分割后图像像素点(x,y)的灰度值,阈值分割结果如图2所示。

图2 阈值分割结果
2.2 形态学开运算降噪
数学形态学简称形态学,其处理方式为领域运算,即把领域结构元素与图像对应位置像素进行逻辑运算,这种运算的影响因素主要有结构元素大小、形状和逻辑运算的规则。形态学操作主要有膨胀、腐蚀、梯度运算、礼帽运算、黑帽运算、开运算和闭运算等,但其基础为腐蚀和膨胀,利用膨胀和腐蚀就能完成不同形式的运算。
腐蚀运算能消除轮廓边界点,使边界向内缩小,主要用于细化二值图像目标轮廓、去除噪声等。

式(4)中,A为原图像,B为结构元素。首先给结构元素B定义一个原点,当结构元素B的原点移动到图像A的(x,y)上时,如果结构元素B上等于1的像素点对应图像A也等于1,则将图像A的(x,y)的灰度值置为1,否则置为0,腐蚀示意图如图3所示。

图3 腐蚀示意图
膨胀运算则与腐蚀运算相反,使边界向外扩张,主要用于填补图像分割后的空白,使相近的不相连的轮廓相连。其公式为:

式(5)中,A为原图像,B为结构元素。首先给结构元素B定义一个原点,当结构元素B的原点移动到图像A的(x,y)上时,如果结构元素B上等于1的像素点对应图像A中至少有一个等于1,则将图像A的(x,y)的灰度值置为1,否则置为0。
先进行腐蚀操作,然后在腐蚀的基础上进行膨胀操作,主要用于去噪和计数等。其公式为:

式(6)中,A为原图像,B、C为结构元素。开运算效果如图4所示,图5为开运算处理的结果。

图4 开运算效果
2.3 区域生长法
区域生长的思想就是把领域(四领域、八领域等)相同的化为一个区域。首先需要一个种子点作为生长的开始,然后将种子点领域内满足相似准则要求的像素点合并到种子的区域,将这个区域的像素做为种子点,继续进行生长,直到没有符合要求的点,生长结束,所有种子点像素作为生长的区域。分割的好坏由初始种子点和相似准则决定。

图5 形态学开运算结果
2.3.1 种子点选择与检测
经过阈值分割和形态学处理后,将二值图像各轮廓中心作为待定种子点。如果选择的种子点位于缺陷的绝对区域,那么种子点总有一个方向各像素的深度值呈现高-低-高的形态。设计检测模板如图6所示,计算出种子点在0°、45°、90°、135°方向上的深度变化,判断其变化是否呈高低高形态。
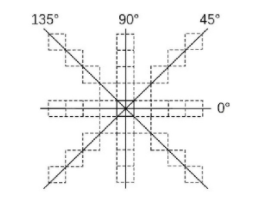
图6 检测模板
种子点左右两侧r个像素的灰度平均值分别为:

各方向的灰度变化为:

深度形Si态变化判定:

式(10)中,I (u)为检测模板中第u个像素的灰度值,w=1,2,3,4,分别代表0°,45°,90°,135°方向,mwm为w方向两侧的最小灰度值,T1为形态变化阈值。如果种子点不满足深度形态变化判定,则去除该待定种子点。
2.3.2 生长过程
区域生长的具体流程如下:
(1)将种子点坐标放入种子点集seeds。
(2)顶出种子点集中的一个种子点,对种子点八邻域的像素点进行相似准则判断;满足相似准则条件的点,视为种子点放入种子点集seeds。
(3)将顶出的种子点存入种子集S。
(4)如果种子点集内没有元素,则跳到步骤(4);如果种子点集中还有元素,则跳到步骤(2)。
(5)生成一张和输入图像长宽一致,像素值全为0的图像I。
(6)将图像I中对应种子集S坐标的像素值置为255,得到分割图像I’。
其中生长的相似准则为:

式(11)中,gray (seed)为当轮种子点的灰度值,gray (8_n)为其八邻域各点的像素值,Thresh为设置的阈值。区域生长结果如图7所示。

图7 区域生长结果
3 实验过程
图像分割就是按照预先设定的规则,将图像分割为有意义的前景和背景的过程。区域生长是一个分割效果比较好的算法,但前提是需要找到适合的种子点。单一的分割算法就容易遇到这种不足的情况,结合使用形态学和阈值分割的方法来找到合适的种子点,帮助区域生长算法完成分割任务,达到满足要求的分割效果,分割方法流程如图8所示。

图8 分割流程图
首先对输入的图片进行灰度化处理,变成单通道的灰度图片,然后滤波去除噪声,使图像更平滑,选择合适的阈值进行阈值分割,在利用开运算去除掉分割后较小的前景,以各前景区域的中心点为起始种子点,进行区域生长,得到最终所满足要求的前景。
二、部分源代码
- 1
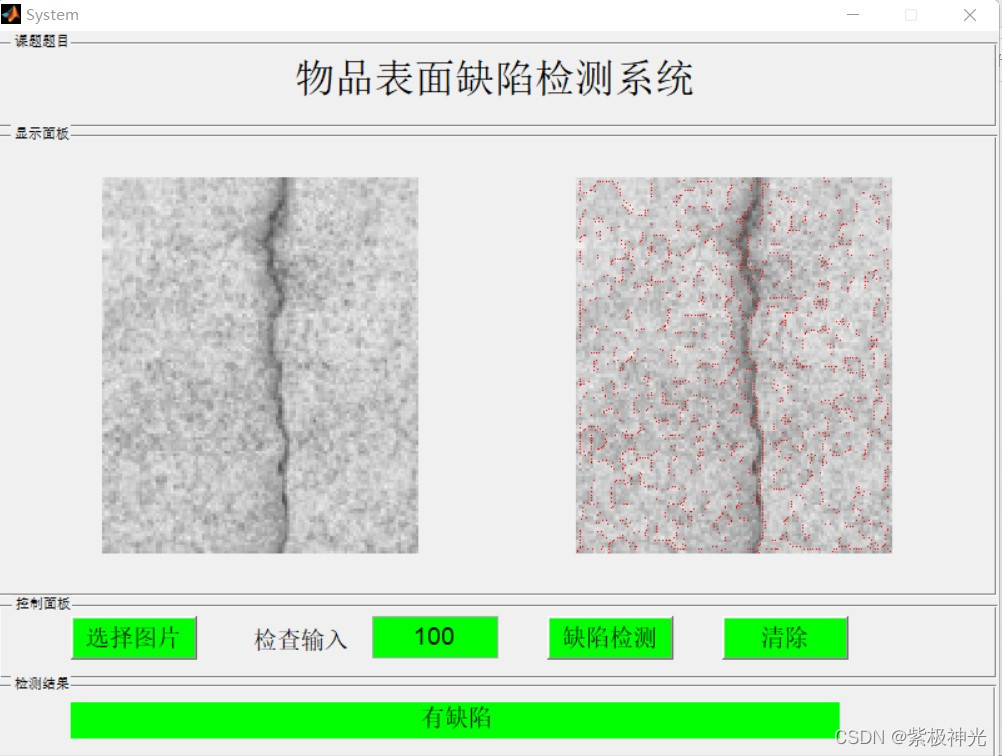
三、运行结果
四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 蔡利梅.MATLAB图像处理——理论、算法与实例分析[M].清华大学出版社,2020.
[2]杨丹,赵海滨,龙哲.MATLAB图像处理实例详解[M].清华大学出版社,2013.
[3]周品.MATLAB图像处理与图形用户界面设计[M].清华大学出版社,2013.
[4]刘成龙.精通MATLAB图像处理[M].清华大学出版社,2015.
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/124137271

- 点赞
- 收藏
- 关注作者
评论(0)