基于小熊派开发板+华为云IoT设计的云端绿化管理系统

1. 设计需求、硬件环境介绍
1.1 项目背景
绿化管理系统在现实生活、生产中的应用十分广泛,它是集环境感知、规划决策、自动管理等功能于一体的综合系统。目前,在城市道路两旁的区域绿化主要为花、草、树、灌木等,其中较多种植物对水的敏感性较高,如果供水不足够或过多,会造成枯萎,甚至死亡。而且采用人工的方式进行管理,不能够较好的了解种植区域的数据,而造成水资源极大地浪费,为响应国家“十四五”规划提出的生态文明建设实现新进步,能源资源配置更加合理、利用效率大幅提高,生态环境持续改善;因此发展先进的智能灌溉技术对绿化管理至关重要。
传统的手动绿化管理控制多采用人工方式通过观察地表潮湿度来进行灌溉,这样不仅造成水资源浪费和人力资源的浪费,而且灌溉不精确。本文就利用华为云IOT物联网平台设计云端绿化管理系统,设备平台采用小熊开发板-CPU是意法半导体的STM32L431芯片,这是意法半导体推出的低功耗芯片;配合外部的一些专业传感器,能够获取空气中的温湿度数据,光照度数据等,根据种植区的空气温湿度数据,判断是否进行灌溉。因此,研究一种具有检测到绿化情况以及价格低廉、应用范围广、性能可靠的绿化管理系统对绿化水平的提高以及节能减排都具有重要的意义。
1.2 实现功能
本项目是利用意法半导体的STM32L431+ESP8266 WIFI ,配合华为云物联网平台服务器,组建一个微小型的绿化管理系统,结合外部传感器采集的数据,并利用这些数据判断是否进行灌溉。
考虑到以学习为目,当前项目采用了ESP8266无线WIFI网卡作为联网设备,ESP8266价钱便宜,支持串口编程,有标准的一套AT资料,资料多,作为学习而言,非常适合。可以通过对ESP8266的编程实验,了解TCP、MQTT网络编程相关知识点。
当前项目主要分为六个功能模块,分别是:基础系统模块、温度采集模块、湿度采集模块、光照采集模块、无线传感器网络模块、OLED显示屏模块。
(1)基础系统模块:进行各个数据的接收与转发,控制扫水作业是否进行,浇水作业是采用板载的电机模拟
(2)温度采集模块:采集监测区域的温度数据,传输到微控制器
(3)湿度采集模块:采集监测区域的湿度数据,传输到微控制器
(4)光照采集模块:采集监测区域的光照数据,传输到微控制器
(5)无线传感器网络模块:数据上传至云平台,数据下发交互等
(6)LCD显示屏模块:实时显示所监测到的各项数据
小熊开发板的扩展板上自带了光敏传感器、温湿度传感器、直流电机模块,可以很方便的实现上面的这些功能需求。
本项目的源代码没有采用官方的案例工程,官方自大工程非常庞大,为了兼容各种设备平台,代码较多,不适合初学者理解代码,本文工程代码全部针对本项目编写,没有多余代码,采用寄存器风格编写,代码简洁,非常适合初学者学习MQTT协议,学习各种传感器的通信协议等等;连接华为云的MQTT协议也是按照MQTT的官方中文手册自行编写的,不依赖任何外部SDK,不依赖ESP8266设备,只要能联网的设备都可以连接华为云IOT,非常适合移植到其他单片机平台;不管是采用51,STM32F1系列,都可以直接参考代码移植。
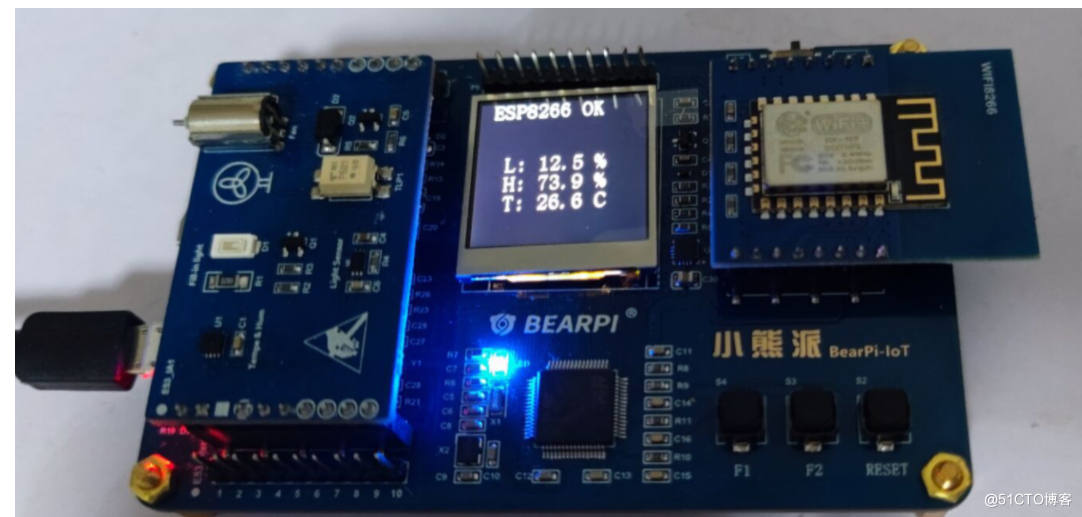
1.3 设备实物图
小熊开发板的设备相关实物图如下:



2. 创建IOT服务器端产品
2.1 创建产品
直接打开物联网产品页面: https://www.huaweicloud.com/product/iothub.html

打开产品页面,选择右上角创建产品。

根据自己情况填写信息。

创建成功后打开产品详情页面,拉到最下面,点击创建自定义模型文件。

这里创建模型文件主要就是为了MQTT客户端能够正确的上传传感器数据上来,每个传感器设置一个属性,这个属性就是表示了传感器的数据值类型。
比如: 先添加一个电机,这个电机就是浇水电机,能上报开关状态,云端也能下发命令控制电机,所以需要添加属性和下发的命令。

添加属性:

添加命令: 因为电机需要云端远程控制。

接下来就创建温度、湿度、光照度传感器的属性,这些传感器只是向云端上传数据,不需要下发指令控制,所以只创建属性就行了。



创建完毕效果,一共有4个属性,电机、温度、湿度、光强度:

2.2 创建设备
选择设备页面,注册设备。

创建后保持设备密匙等信息,接下来登录服务器时,生成MQTT账号密匙需要用到这些参数。

当前创建的设备信息如下:
2.3 生成MQTT登录账号信息
官微提供的在线小工具: https://iot-tool.obs-website.cn-north-4.myhuaweicloud.com/
按照提示填入数据,生成,非常方便。

当前生成的信息如下:
3. 使用MQTT客户端模拟测试
为了验证服务器配置是否OK,先使用MQTT客户端软件进行连接测试。
3.1 华为云IOT服务器地址与端口

3.2 订阅主题
在产品页面,可以看到主题管理页面,能看到当前设备可以订阅的主题有哪些。

一般订阅下发的数据:
3.3 上报主题数据
官方文档介绍: https://support.huaweicloud.com/devg-iothub/iot_01_2127.html

服务ID,属性ID在产品页面查看,2.1小节创建产品里就讲了这个属性的作用。

每次可以单个属性上报,也可以一起上报。
3.4 登录服务器
按照软件提示,填入相关数据即可。
如需要也需要使用和我一样的同款软件,打开百度搜索MQTT客户端_v2.4(协议3.1.1).exe 即可找到下载地址。

发送数据后查看云端,已经登录成功,数据已经上传成功。

3.5 下发命令
电机设备支持读写,支持下发命令,在设备页面测试。


点击确定之后,参看MQTT客户端软件,已经收到了下发的数据。

4. 设备端上华为云IOT
工程代码:



工程代码较多,这里就贴出main.c全部代码:

- 点赞
- 收藏
- 关注作者
评论(0)