【古月21讲】ROS入门系列(2)——发布者Publisher、订阅者Subscriber的编程实现+自定义话题消息编程实现

4、发布者Publisher的编程实现
-
创建功能包
cd ~/catkin_ws/src catkin_create_pkg learning_topic rospy roscpp std_msgs geometry_msgs turtlesim -
创建发布者代码(C++) ——文件名为velocity_publisher.cpp
/*********************************************************************** Copyright 2020 GuYueHome (www.guyuehome.com). ***********************************************************************/ /** * 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist */ #include <ros/ros.h> #include <geometry_msgs/Twist.h> int main(int argc, char **argv) { // ROS节点初始化 ros::init(argc, argv, "velocity_publisher"); //velocity_publisher为节点 // 创建节点句柄 ros::NodeHandle n; // 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10 ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10); // 设置循环的频率 ros::Rate loop_rate(10); int count = 0; while (ros::ok()) { // 初始化geometry_msgs::Twist类型的消息 geometry_msgs::Twist vel_msg; vel_msg.linear.x = 0.5; vel_msg.angular.z = 0.2; // 发布消息 turtle_vel_pub.publish(vel_msg); ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]", vel_msg.linear.x, vel_msg.angular.z); // 按照循环频率延时 loop_rate.sleep(); } return 0; }总结上面的代码,实现一个发布者的步骤为:
- 初始化ROS节点
- 向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型
- 创建消息数据
- 按照一定的频率循环发布消息
这里也给出python的代码实现,实现步骤与C++一致
#!/usr/bin/env python # -*- coding: utf-8 -*- ######################################################################## #### Copyright 2020 GuYueHome (www.guyuehome.com). ### ######################################################################## # 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist import rospy from geometry_msgs.msg import Twist def velocity_publisher(): # ROS节点初始化 rospy.init_node('velocity_publisher', anonymous=True) # 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10 turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10) #设置循环的频率 rate = rospy.Rate(10) while not rospy.is_shutdown(): # 初始化geometry_msgs::Twist类型的消息 vel_msg = Twist() vel_msg.linear.x = 0.5 vel_msg.angular.z = 0.2 # 发布消息 turtle_vel_pub.publish(vel_msg) rospy.loginfo("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]", vel_msg.linear.x, vel_msg.angular.z) # 按照循环频率延时 rate.sleep() if __name__ == '__main__': try: velocity_publisher() except rospy.ROSInterruptException: pass -
配置发布者代码编译规则
配置编译规则主要进行两个设置:
-
第一个是设置需要的编译的代码和生成的可执行文件
add_executable(velocity_publisher src/velocity_publisher.cpp)这句代码的含义是编译src路径下的velocity_publisher.cpp文件,并生成可执行文件velocity_publisher。
-
第二个是设置链接库
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
将上述两行代码放置到功能包learning_topic下的CMakeLists.txt中,放置具体位置如下图所示:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-kjcFGdba-1637672423153)(C:\Users\1\AppData\Roaming\Typora\typora-user-images\image-20211121190337523.png)]](https://res-hd.hc-cdn.cn/ecology/9.3.209/v2_resources/ydcomm/libs/images/loading.gif)
-
-
编译并运行发布者
cd ~/catkin_ws catkin_make source devel/setup.bash roscore rosrun turtlesim turtlesim_node rosrun learning_topic velocity_publisher可以从下图看出,小海龟正以0.5m/s,0.2rad/s的速度运动,此时做圆周运动。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-kjcFGdba-1637672423153)(C:\Users\1\AppData\Roaming\Typora\typora-user-images\image-20211121190337523.png)]](https://img-blog.csdnimg.cn/af25a491f136479ba3d972b6bfca0195.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA56eD5aS05bCP6IuP,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-RFeUKUGS-1637672423158)(C:\Users\1\AppData\Roaming\Typora\typora-user-images\image-20211121191035988.png)]](https://img-blog.csdnimg.cn/35e556932aac482493159a498aaae642.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA56eD5aS05bCP6IuP,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
5、订阅者Subscriber的编程实现
-
创建订阅者代码(c++) ——文件名为pose_subscriber.cpp
/*********************************************************************** Copyright 2020 GuYueHome (www.guyuehome.com). ***********************************************************************/ /** * 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose */ #include <ros/ros.h> #include "turtlesim/Pose.h" // 接收到订阅的消息后,会进入消息回调函数 void poseCallback(const turtlesim::Pose::ConstPtr& msg) { // 将接收到的消息打印出来 ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y); } int main(int argc, char **argv) { // 初始化ROS节点 ros::init(argc, argv, "pose_subscriber"); // 创建节点句柄 ros::NodeHandle n; // 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback); // 循环等待回调函数 ros::spin(); return 0; }总结上面的代码,实现一个订阅者的步骤为:
- 初始化ROS节点
- 订阅需要的话题
- 循环等待话题消息,接收到消息后进入回调函数
- 在回调函数中完成消息处理
这里同样给出python的代码实现,实现步骤与C++一致
#!/usr/bin/env python # -*- coding: utf-8 -*- ######################################################################## #### Copyright 2020 GuYueHome (www.guyuehome.com). ### ######################################################################## # 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose import rospy from turtlesim.msg import Pose def poseCallback(msg): rospy.loginfo("Turtle pose: x:%0.6f, y:%0.6f", msg.x, msg.y) def pose_subscriber(): # ROS节点初始化 rospy.init_node('pose_subscriber', anonymous=True) # 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback rospy.Subscriber("/turtle1/pose", Pose, poseCallback) # 循环等待回调函数 rospy.spin() if __name__ == '__main__': pose_subscriber() -
配置订阅者代码编译规则
配置编译规则主要进行两个设置:
-
第一个是设置需要的编译的代码和生成的可执行文件
add_executable(pose_subscriber src/pose_subscriber.cpp)这句代码的含义是编译src路径下的pose_subscriber.cpp文件,并生成可执行文件pose_subscriber。
-
第二个是设置链接库
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})
是不是发现和配置发布者代码编译规则基本一致,是的,可以说没什么区别,那么这两句代码就可以放在配置发布者代码的下面。如图:
-
-
编译并运行订阅者
cd ~/catkin_ws catkin_make source devel/setup.bash roscore rosrun turtlesim turtlesim_node rosrun learning_topic velocity_publisher可以看出,控制台可以实时输出小乌龟的位置信息。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-WP5lPFKe-1637672423163)(C:\Users\1\AppData\Roaming\Typora\typora-user-images\image-20211121192601418.png)]](https://img-blog.csdnimg.cn/076cd9e6e94b48d1a07d05dc93aab8a4.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA56eD5aS05bCP6IuP,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tgEO0fWR-1637672423168)(C:\Users\1\AppData\Roaming\Typora\typora-user-images\image-20211121193430012.png)]](https://img-blog.csdnimg.cn/e75d2157542d4cd19033a4a1c4fbe70b.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA56eD5aS05bCP6IuP,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
6、自定义话题消息
上文介绍了话题的订阅和发布,但这些话题都是系统提供的,我们自然会想到,我们可不可以自己定义话题来使用呢?…好吧…我这么说肯定是有的了,下面就来介绍自定义话题消息的定义和使用 。
-
定义话题消息
-
定义msg文件
//在learning_topic目录下创建msg文件夹 cd ~/catkin_ws/src/learning_topic mkdir msg //创建Penson.msg文件 touch Person.msg创建好Person.msg文件后,在文件中写入以下内容:
string name uint8 sex uint8 age uint8 unknown = 0 uint8 male = 1 uint8 female = 2 -
在package.xml中添加功能包依赖
<build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend> -
在CMakeLists.txt中添加编译选项
find_package( …… message_generation)add_message_files(FILES Person.msg) generate_messages(DEPENDENCIES std_msgs)catkin_package(…… message_runtime)编译生成语言相关文件
cd ~/catkin_ws catkin_make -
-
实现一个发布者(C++) ——文件名为person_publisher.cpp
/*********************************************************************** Copyright 2020 GuYueHome (www.guyuehome.com). ***********************************************************************/ /** * 该例程将发布/person_info话题,自定义消息类型learning_topic::Person */ #include <ros/ros.h> #include "learning_topic/Person.h" int main(int argc, char **argv) { // ROS节点初始化 ros::init(argc, argv, "person_publisher"); // 创建节点句柄 ros::NodeHandle n; // 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10 ros::Publisher person_info_pub = n.advertise<learning_topic::Person>("/person_info", 10); // 设置循环的频率 ros::Rate loop_rate(10); int count = 0; while (ros::ok()) { // 初始化learning_topic::Person类型的消息 learning_topic::Person person_msg; person_msg.name = "wsj"; person_msg.age = 18; person_msg.sex = learning_topic::Person::male; // 发布消息 person_info_pub.publish(person_msg); ROS_INFO("Publish Person Info: name:%s age:%d sex:%d", person_msg.name.c_str(), person_msg.age, person_msg.sex); // 按照循环频率延时 loop_rate.sleep(); } return 0; }该部分和之前的步骤基本一致,这里不再进行总结。
同样,这里给出python的代码供参考:
#!/usr/bin/env python # -*- coding: utf-8 -*- ######################################################################## #### Copyright 2020 GuYueHome (www.guyuehome.com). ### ######################################################################## # 该例程将发布/person_info话题,自定义消息类型learning_topic::Person import rospy from learning_topic.msg import Person def velocity_publisher(): # ROS节点初始化 rospy.init_node('person_publisher', anonymous=True) # 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10 person_info_pub = rospy.Publisher('/person_info', Person, queue_size=10) #设置循环的频率 rate = rospy.Rate(10) while not rospy.is_shutdown(): # 初始化learning_topic::Person类型的消息 person_msg = Person() person_msg.name = "wsj"; person_msg.age = 18; person_msg.sex = Person.male; # 发布消息 person_info_pub.publish(person_msg) rospy.loginfo("Publsh person message[%s, %d, %d]", person_msg.name, person_msg.age, person_msg.sex) # 按照循环频率延时 rate.sleep() if __name__ == '__main__': try: velocity_publisher() except rospy.ROSInterruptException: pass -
实现一个订阅者(C++) ——文件名为person_subscriber.cpp
/*********************************************************************** Copyright 2020 GuYueHome (www.guyuehome.com). ***********************************************************************/ /** * 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person */ #include <ros/ros.h> #include "learning_topic/Person.h" // 接收到订阅的消息后,会进入消息回调函数 void personInfoCallback(const learning_topic::Person::ConstPtr& msg) { // 将接收到的消息打印出来 ROS_INFO("Subcribe Person Info: name:%s age:%d sex:%d", msg->name.c_str(), msg->age, msg->sex); } int main(int argc, char **argv) { // 初始化ROS节点 ros::init(argc, argv, "person_subscriber"); // 创建节点句柄 ros::NodeHandle n; // 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback ros::Subscriber person_info_sub = n.subscribe("/person_info", 10, personInfoCallback); // 循环等待回调函数 ros::spin(); return 0; }python代码如下:
#!/usr/bin/env python # -*- coding: utf-8 -*- ######################################################################## #### Copyright 2020 GuYueHome (www.guyuehome.com). ### ######################################################################## # 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person import rospy from learning_topic.msg import Person def personInfoCallback(msg): rospy.loginfo("Subcribe Person Info: name:%s age:%d sex:%d", msg.name, msg.age, msg.sex) def person_subscriber(): # ROS节点初始化 rospy.init_node('person_subscriber', anonymous=True) # 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback rospy.Subscriber("/person_info", Person, personInfoCallback) # 循环等待回调函数 rospy.spin() if __name__ == '__main__': person_subscriber() -
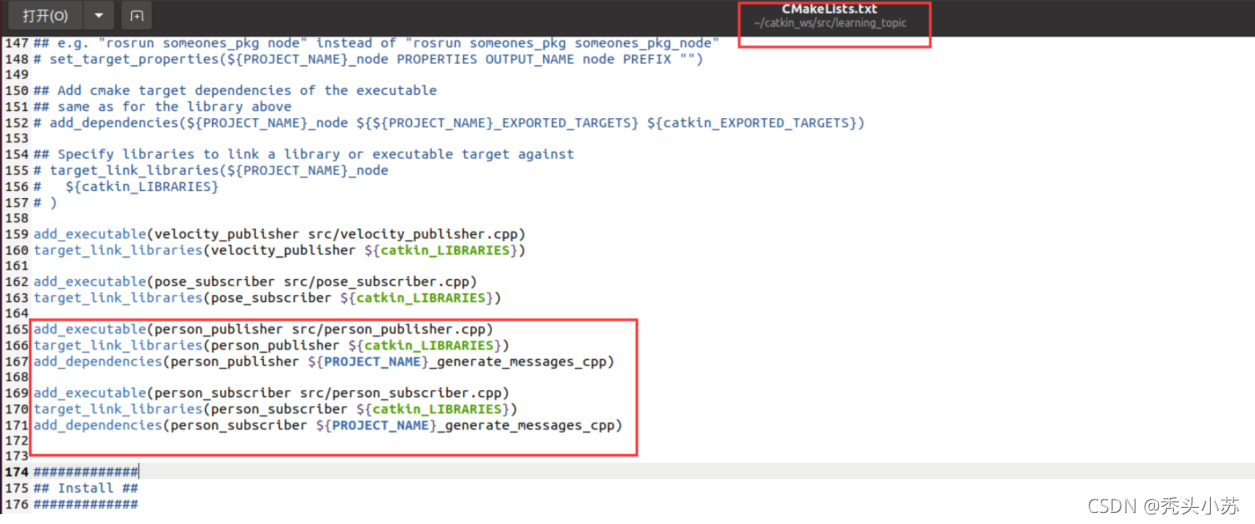
配置编译规则
- 设置需要编译的代码和可执行文件
- 设置链接库
- 添加依赖项
add_executable(person_publisher src/person_publisher.cpp) target_link_libraries(person_publisher ${catkin_LIBRARIES}) add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp) add_executable(person_subscriber src/person_subscriber.cpp) target_link_libraries(person_subscriber ${catkin_LIBRARIES}) add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)放置的具体位置如下:
-
编译并运行发布者和订阅者
cd ~/catkin_ws catkin_make roscore rosrun learning_topic person_subscriber rosrun learning_topic person_publisher运行结果如下:发布消息后成功订阅
**注:**这里我们可以尝试程序运行过程中把roscore关掉,看看是否能继续发布和订阅消息?
(答案是能,roscore启动是Rosmaster, Rosmaster这里的作用是帮助建立连接,一旦连接建立好,关掉roscore也无影响)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-GlX4uwRt-1637672423171)(C:\Users\1\AppData\Roaming\Typora\typora-user-images\image-20211122111534871.png)]](https://img-blog.csdnimg.cn/b27d6288c27b406eab851053e822ed61.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA56eD5aS05bCP6IuP,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-FSFVvHcW-1637672423173)(C:\Users\1\AppData\Roaming\Typora\typora-user-images\image-20211122111828161.png)]](https://img-blog.csdnimg.cn/36746d94d9134e3a9a258344f39b280b.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA56eD5aS05bCP6IuP,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-KiXuAg95-1637672423174)(C:\Users\1\AppData\Roaming\Typora\typora-user-images\image-20211122111910394.png)]](https://img-blog.csdnimg.cn/c28f0bb6400c4b62a445aeb626a8c19e.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA56eD5aS05bCP6IuP,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-cDlKdZRU-1637672423176)(C:\Users\1\AppData\Roaming\Typora\typora-user-images\image-20211122112000511.png)]](https://img-blog.csdnimg.cn/4df55cb051c14e618e385a6ec9816f52.png#pic_center)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-TNDHuSw6-1637672423180)(C:\Users\1\AppData\Roaming\Typora\typora-user-images\image-20211122143911676.png)]](https://img-blog.csdnimg.cn/926c7ff907c54c4e8ac36ec105a33f3b.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA56eD5aS05bCP6IuP,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
咻咻咻咻~~duang~~点个赞呗
上一篇:ROS入门系列(1)——ROS命令工具的使用及创建工作空间和功能包
下一篇:【古月21讲】ROS入门系列(3)——客户端Client、服务器Server的编程实现+自定义服务数据编程实现

- 点赞
- 收藏
- 关注作者
评论(0)