Docker Swarm架构、特性与基本实践

点击上方“民工哥技术之路”选择“星标”
每天10点为你分享不一样的干货


前言
Docker集群管理和编排的特性是通过SwarmKit进行构建的, 其中Swarm mode是Docker Engine内置支持的一种默认实现。Docker 1.12以及更新的版本,都支持Swarm mode,我们可以基于Docker Engine来构建Swarm集群,然后就可以将我们的应用服务(Application Service)部署到Swarm集群中。创建Swarm集群的方式很简单,先初始化一个Swarm集群,然后将其他的Node加入到该集群即可。本文主要基于Docker Swarm官网文档,学习总结。
基本特性
Docker Swarm具有如下基本特性:
集群管理集成进Docker Engine
使用内置的集群管理功能,我们可以直接通过Docker CLI命令来创建Swarm集群,然后去部署应用服务,而不再需要其它外部的软件来创建和管理一个Swarm集群。
去中心化设计
Swarm集群中包含Manager和Worker两类Node,我们可以直接基于Docker Engine来部署任何类型的Node。而且,在Swarm集群运行期间,我们既可以对其作出任何改变,实现对集群的扩容和缩容等,如添加Manager Node,如删除Worker Node,而做这些操作不需要暂停或重启当前的Swarm集群服务。
声明式服务模型(Declarative Service Model)
在我们实现的应用栈中,Docker Engine使用了一种声明的方式,让我们可以定义我们所期望的各种服务的状态,例如,我们创建了一个应用服务栈:一个Web前端服务、一个后端数据库服务、Web前端服务又依赖于一个消息队列服务。
服务扩容缩容
对于我们部署的每一个应用服务,我们可以通过命令行的方式,设置启动多少个Docker容器去运行它。已经部署完成的应用,如果有扩容或缩容的需求,只需要通过命令行指定需要几个Docker容器即可,Swarm集群运行时便能自动地、灵活地进行调整。
协调预期状态与实际状态的一致性
Swarm集群Manager Node会不断地监控集群的状态,协调集群状态使得我们预期状态和实际状态保持一致。例如我们启动了一个应用服务,指定服务副本为10,则会启动10个Docker容器去运行,如果某个Worker Node上面运行的2个Docker容器挂掉了,则Swarm Manager会选择集群中其它可用的Worker Node,并创建2个服务副本,使实际运行的Docker容器数仍然保持与预期的10个一致。
多主机网络
我们可以为待部署应用服务指定一个Overlay网络,当应用服务初始化或者进行更新时,Swarm Manager在给定的Overlay网络中为Docker容器自动地分配IP地址,实际是一个虚拟IP地址(VIP)。
服务发现
Swarm Manager会给集群中每一个服务分配一个唯一的DNS名称,对运行中的Docker容器进行负载均衡。我们可以通过Swarm内置的DNS Server,查询Swarm集群中运行的Docker容器状态。
负载均衡
在Swarm内部,可以指定如何在各个Node之间分发服务容器(Service Container),实现负载均衡。如果想要使用Swarm集群外部的负载均衡器,可以将服务容器的端口暴露到外部。
安全策略
在Swarm集群内部的Node,强制使用基于TLS的双向认证,并且在单个Node上以及在集群中的Node之间,都进行安全的加密通信。我们可以选择使用自签名的根证书,或者使用自定义的根CA(Root CA)证书。
滚动更新(Rolling Update)
对于服务需要更新的场景,我们可以在多个Node上进行增量部署更新,Swarm Manager支持通过使用Docker CLI设置一个delay时间间隔,实现多个服务在多个Node上依次进行部署。这样可以非常灵活地控制,如果有一个服务更新失败,则暂停后面的更新操作,重新回滚到更新之前的版本。
基本架构
Docker Swarm提供了基本的集群能力,能够使多个Docker Engine组合成一个group,提供多容器服务。Swarm使用标准的Docker API,启动容器可以直接使用docker run命令。Swarm更核心的则是关注如何选择一个主机并在其上启动容器,最终运行服务。
Docker Swarm基本架构,如下图所示(来自网络,详见后面参考链接):
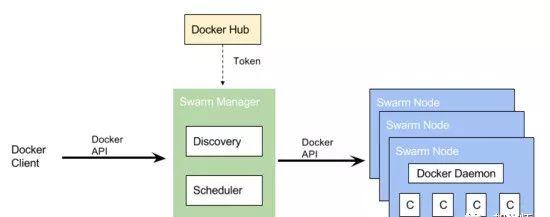
如上图所示,Swarm Node表示加入Swarm集群中的一个Docker Engine实例,基于该Docker Engine可以创建并管理多个Docker容器。其中,最开始创建Swarm集群的时候,Swarm Manager便是集群中的第一个Swarm Node。在所有的Node中,又根据其职能划分为Manager Node和Worker Node,具体分别如下所示:
Manager Node
Manager Node负责调度Task,一个Task表示要在Swarm集群中的某个Node上启动Docker容器,一个或多个Docker容器运行在Swarm集群中的某个Worker Node上。同时,Manager Node还负责编排容器和集群管理功能(或者更准确地说,是具有Manager管理职能的Node),维护集群的状态。需要注意的是,默认情况下,Manager Node也作为一个Worker Node来执行Task。Swarm支持配置Manager只作为一个专用的管理Node,后面我们会详细说明。
Worker Node
Worker Node接收由Manager Node调度并指派的Task,启动一个Docker容器来运行指定的服务,并且Worker Node需要向Manager Node汇报被指派的Task的执行状态。
构建Swarm集群
我们实践Swarm集群,包括三个节Node,对应的主机名和IP地址分别如下所示:
首先,需要保证各个Node上,docker daemon进程已经正常启动,如果没有则执行如下命令启动:
接下来就可以创建Swarm集群,创建Swarm的命令,格式如下所示:
docker swarm init --advertise-addr <MANAGER-IP>
我们在准备好的manager Node上,登录到该Node,创建一个Swarm,执行如下命令:
上面–advertise-addr选项指定Manager Node会publish它的地址为192.168.1.107,后续Worker Node加入到该Swarm集群,必须要能够访问到Manager的该IP地址。可以看到,上述命令执行结果,如下所示:
该结果中给出了后续操作引导信息,告诉我们如何将一个Worker Node加入到Swarm集群中。也可以通过如下命令,来获取该提示信息:
在任何时候,如果我们需要向已经创建的Swarm集群中增加Worker Node,只要新增一个主机(物理机、云主机等都可以),并在其上安装好Docker Engine并启动,然后执行上述docker swarm join命令,就可以加入到Swarm集群中。
这时,我们也可以查看当前Manager Node的基本信息,执行docker info命令,输出信息中可以看到,包含如下关于Swarm的状态信息:
-
Swarm: active NodeID: qc42f6myqfpoevfkrzmx08n0r
-
Is Manager: true ClusterID: qi4i0vh7lgb60qxy3mdygb27f Managers: 1
-
Nodes: 1
可以看出,目前Swarm集群只有Manager一个Node,而且状态是active。也可以在Manager Node上执行docker node ls命令查看Node状态,如下所示:
接下来,我们可以根据上面提示信息,我们分别在worker1、worker2两个Worker Node 上,执行命令将Worker Node加入到Swarm集群中,命令如下所示:
如果成功,可以看到成功加入Swarm集群的信息。这时,也可以在Manager Node上,查看Swarm集群的信息,示例如下所示:
想要查看Swarm集群中全部Node的详细状态信息,可以执行如下所示命令:
Swarm集群Node的状态信息,如下所示:
上面信息中,AVAILABILITY表示Swarm Scheduler是否可以向集群中的某个Node指派Task,对应有如下三种状态:
Active:集群中该Node可以被指派Task
Pause:集群中该Node不可以被指派新的Task,但是其他已经存在的Task保持运行
Drain:集群中该Node不可以被指派新的Task,Swarm Scheduler停掉已经存在的Task,并将它们调度到可用的Node上
查看某一个Node的状态信息,可以在该Node上执行如下命令:
docker node inspect self
我们在Manager Node上执行上述命令,查看的状态信息如下所示:
管理Swarm Node
Swarm支持设置一组Manager Node,通过支持多Manager Node实现HA。那么这些Manager Node之间的状态的一致性就非常重要了,多Manager Node的Warm集群架构,如下图所示(出自Docker官网):
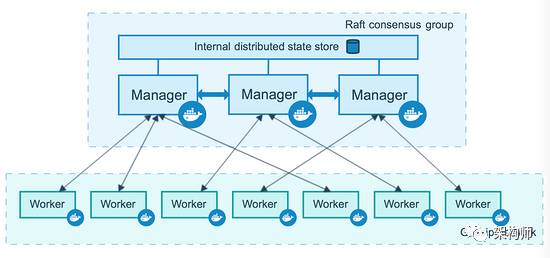
通过上图可以看到,Swarm使用了Raft协议来保证多个Manager之间状态的一致性。基于Raft协议,Manager Node具有一定的容错功能,假设Swarm集群中有个N个Manager Node,那么整个集群可以容忍最多有(N-1)/2个节点失效。如果是一个三Manager Node的Swarm集群,则最多只能容忍一个Manager Node挂掉。
下面,我们按照对Node的不同操作,通过命令的方式来详细说明:
(1)Node状态变更管理
前面我们已经提到过,Node的AVAILABILITY有三种状态:Active、Pause、Drain,对某个Node进行变更,可以将其AVAILABILITY值通过Docker CLI修改为对应的状态即可,下面是常见的变更操作:
设置Manager Node只具有管理功能
对服务进行停机维护,可以修改AVAILABILITY为Drain状态
暂停一个Node,然后该Node就不再接收新的Task
恢复一个不可用或者暂停的Node
例如,将Manager Node的AVAILABILITY值修改为Drain状态,使其只具备管理功能,执行如下命令:
这样,Manager Node不能被指派Task,也就是不能部署实际的Docker容器来运行服务,而只是作为管理Node的角色。
(2)给Node添加标签元数据
每个Node的主机配置情况可能不同,比如有的适合运行CPU密集型应用,有的适合运行IO密集型应用,Swarm支持给每个Node添加标签元数据,这样可以根据Node的标签,来选择性地调度某个服务部署到期望的一组Node上。
给SWarm集群中的某个Worker Node添加标签,执行如下命令格式如下:
(3)Node提权/降权
改变Node的角色,Worker Node可以变为Manager Node,这样实际Worker Node有工作Node变成了管理Node,对应提权操作,例如将worker1和worker2都升级为Manager Node,执行如下命令:
(4)退出Swarm集群
如果Manager想要退出Swarm集群, 在Manager Node上执行如下命令:
即使Manager已经退出SWarm集群,执行上述命令也可以使得Worker Node退出集群,然后又可以加入到其它新建的Swarm集群中。
管理服务
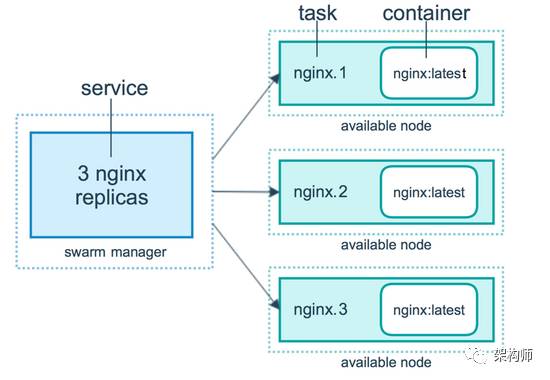
在Swarm集群上部署服务,必须在Manager Node上进行操作。先说明一下Service、Task、Container(容器)这个三个概念的关系,如下图(出自Docker官网)非常清晰地描述了这个三个概念的含义:
在Swarm mode下使用Docker,可以实现部署运行服务、服务扩容缩容、删除服务、滚动升级等功能,下面我们详细说明。
(1)创建服务
创建Docker服务,可以使用docker service create命令实现,例如,我们要创建如下两个服务,执行如下命令:
第一个命令行,从Docker镜像alpine创建了一个名称为myapp的服务,其中指定服务副本数为1,也就是启动一个Docker容器来运行该服务。第二个命令行, 创建一个Redis服务,服务副本数为2,那么会启动两个Docker容器来运行myredis服务。查看当前,已经部署启动的全部应用服务,执行如下命令:
执行结果,如下所示:
也可以查询指定服务的详细信息,执行如下命令:
查看结果信息,如下所示:
上面信息中,在manager和worker1这两个Node上部署了myredis这个应用服务,也包含了它们对应的当前状态信息。此时,也可以通过执行docker ps命令,在Manager Node上查看当前启动的Docker容器:
上面,通过 --env 选项来设置环境变量,通过 --workdir 选项来设置工作目录,通过 --user选项来设置用户信息。
(2)扩容缩容服务
Docker Swarm支持服务的扩容缩容,Swarm通过 --mode 选项设置服务类型,提供了两种模式:一种是replicated,我们可以指定服务Task的个数(也就是需要创建几个冗余副本),这也是Swarm默认使用的服务类型;另一种是global,这样会在Swarm集群的每个Node上都创建一个服务。如下图所示(出自Docker官网),是一个包含replicated和global模式的Swarm集群:
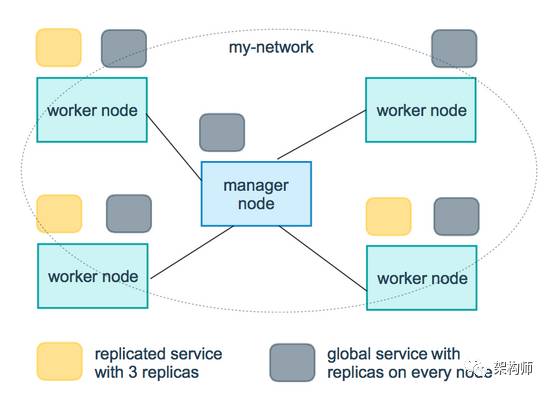
上图中,黄色表示的replicated模式下的Service Replicas,灰色表示global模式下Service的分布。
服务扩容缩容,在Manager Node上执行命令的格式,如下所示:
例如,将前面我们部署的2个副本的myredis服务,扩容到3个副本,执行如下命令:
通过命令docker service ls 查看,扩容操作结果如下所示:
可以看到,我们目前3个Node的Swarm集群,每个Node上都有一个myredis应用服务的副本,可见也实现了很好的负载均衡。
缩容服务,只需要将副本数小于当前应用服务拥有的副本数即可实现,大于指定缩容副本数的副本会被删除。
(3)删除服务
删除服务,只需要在Manager Node上执行如下命令即可:
例如,删除myredis应用服务,执行docker service rm myredis,则应用服务myredis的全部副本都会被删除。
(4)滚动更新
服务的滚动更新,这里我参考官网文档的例子说明。在Manager Node上执行如下命令:
上面通过指定 --update-delay 选项,表示需要进行更新的服务,每次成功部署一个,延迟10秒钟,然后再更新下一个服务。如果某个服务更新失败,则Swarm的调度器就会暂停本次服务的部署更新。
另外,也可以更新已经部署的服务所在容器中使用的Image的版本,例如执行如下命令:
将Redis服务对应的Image版本有3.0.6更新为3.0.7,同样,如果更新失败,则暂停本次更新。
(5)添加Overlay网络
在Swarm集群中可以使用Overlay网络来连接到一个或多个服务。具体添加Overlay网络,首先,我们需要创建在Manager Node上创建一个Overlay网络,执行如下命令:
这样,如果Swarm集群中其他Node上的Docker容器也使用my-network这个网络,那么处于该Overlay网络中的所有容器之间,通过网络可以连通。
作者:Yanjun
原文:http://shiyanjun.cn/archives/1625.html
关注 民工哥技术之路 微信公众号对话框回复关键字:1024 可以获取一份最新整理的技术干货。

点击【阅读原文】和民工哥一起聊技术、搞事情~~
点“在看”一定不能放弃啊!
文章来源: mingongge.blog.csdn.net,作者:民工哥,版权归原作者所有,如需转载,请联系作者。
原文链接:mingongge.blog.csdn.net/article/details/100909692

- 点赞
- 收藏
- 关注作者
评论(0)