28.3.4.2内核下的I2C驱动(三)

【摘要】
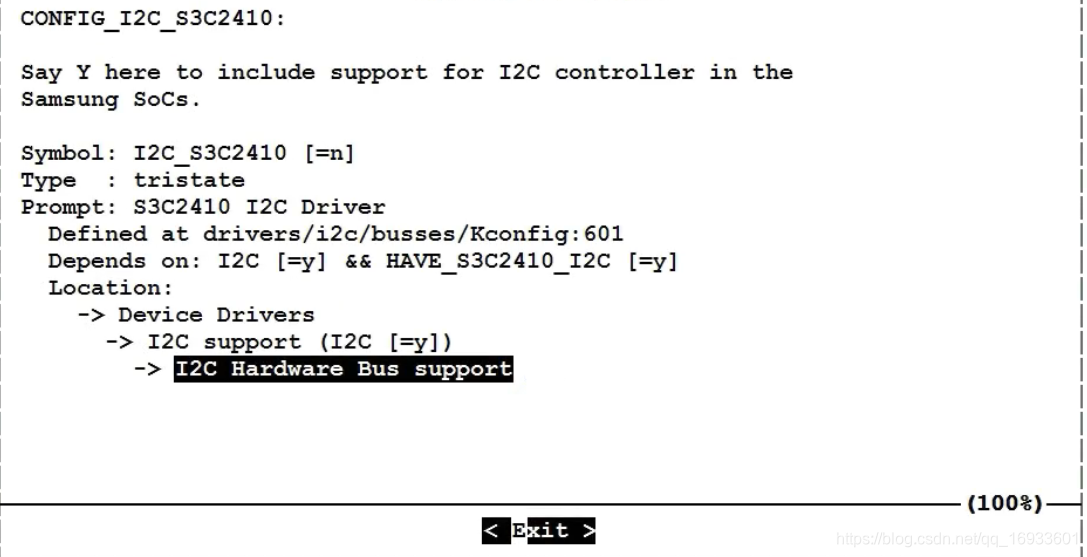
下面我们自己编写I2C总线驱动,先看下内核的总线驱动怎么写的。 参考内核自带的适配器adapter,搜索配置文件 i2c-s3c2410.c 初始化函数i2c_adap_s3c_init看起
stat...
下面我们自己编写I2C总线驱动,先看下内核的总线驱动怎么写的。
参考内核自带的适配器adapter,搜索配置文件

i2c-s3c2410.c
初始化函数i2c_adap_s3c_init看起
static int __init i2c_adap_s3c_init(void)
{
return platform_driver_register(&s3c24xx_i2c_driver);
}
- 1
- 2
- 3
- 4
platform_driver_register
int platform_driver_register(struct platform_driver *drv)
{
drv->driver.bus = &platform_bus_type;
if (drv->probe)
drv->driver.probe = platform_drv_probe;
if (drv->remove)
drv->driver.remove = platform_drv_remove;
if (drv->shutdown)
drv->driver.shutdown = platform_drv_shutdown;
return driver_register(&drv->driver);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
s3c24xx_i2c_probe
static int s3c24xx_i2c_probe(struct platform_device *pdev)
{
struct s3c24xx_i2c *i2c;
struct s3c2410_platform_i2c *pdata = NULL;
struct resource *res;
int ret;
........
/*分配设置构造I2C adap*/
strlcpy(i2c->adap.name, "s3c2410-i2c", sizeof(i2c->adap.name));
i2c->adap.owner = THIS_MODULE;
i2c->adap.algo = &s3c24xx_i2c_algorithm;
i2c->adap.retries = 2;
i2c->adap.class = I2C_CLASS_HWMON | I2C_CLASS_SPD;
i2c->tx_setup = 50;
........
of_i2c_register_devices(&i2c->adap);//注册函数
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
s3c24xx_i2c_algorithm
static const struct i2c_algorithm s3c24xx_i2c_algorithm = {
.master_xfer = s3c24xx_i2c_xfer,//重点!底层发送操作
.functionality = s3c24xx_i2c_func,//返回适配器支持的功能
};
- 1
- 2
- 3
- 4
读写时序参考下图和裸机源码

源码如下:
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/i2c.h>
#include <linux/init.h>
#include <linux/time.h>
#include <linux/interrupt.h>
#include <linux/delay.h>
#include <linux/errno.h>
#include <linux/err.h>
#include <linux/platform_device.h>
#include <linux/pm_runtime.h>
#include <linux/clk.h>
#include <linux/cpufreq.h>
#include <linux/slab.h>
#include <linux/io.h>
#include <linux/of_i2c.h>
#include <linux/of_gpio.h>
#include <plat/gpio-cfg.h>
#include <mach/regs-gpio.h>
#include <asm/irq.h>
#include <plat/regs-iic.h>
#include <plat/iic.h>
//#define PRINTK printk 参考裸板程序
#define PRINTK(...)
enum s3c24xx_i2c_state {
STATE_IDLE,
STATE_START,
STATE_READ,
STATE_WRITE,
STATE_STOP
};
struct s3c2440_i2c_regs {
unsigned int iiccon;
unsigned int iicstat;
unsigned int iicadd;
unsigned int iicds;
unsigned int iiclc;
};
struct s3c2440_i2c_xfer_data {
struct i2c_msg *msgs;
int msn_num;//当前消息的数量
int cur_msg;//当前传输的消息
int cur_ptr;
int state;
int err;
wait_queue_head_t wait;
};
static struct s3c2440_i2c_xfer_data s3c2440_i2c_xfer_data;
static struct s3c2440_i2c_regs *s3c2440_i2c_regs;
static void s3c2440_i2c_start(void)
{
s3c2440_i2c_xfer_data.state = STATE_START;
if (s3c2440_i2c_xfer_data.msgs->flags & I2C_M_RD) /* 读 */
{
s3c2440_i2c_regs->iicds = s3c2440_i2c_xfer_data.msgs->addr << 1;
s3c2440_i2c_regs->iicstat = 0xb0; // 主机接收,启动
}
else /* 写 */
{
s3c2440_i2c_regs->iicds = s3c2440_i2c_xfer_data.msgs->addr << 1;
s3c2440_i2c_regs->iicstat = 0xf0; // 主机发送,启动
}
}
static void s3c2440_i2c_stop(int err)
{
s3c2440_i2c_xfer_data.state = STATE_STOP;
s3c2440_i2c_xfer_data.err = err;
PRINTK("STATE_STOP, err = %d\n", err);
if (s3c2440_i2c_xfer_data.msgs->flags & I2C_M_RD) /* 读 */
{
// 下面两行恢复I2C操作,发出P信号
s3c2440_i2c_regs->iicstat = 0x90;
s3c2440_i2c_regs->iiccon = 0xaf;
ndelay(50); // 等待一段时间以便P信号已经发出
}
else /* 写 */
{
// 下面两行用来恢复I2C操作,发出P信号
s3c2440_i2c_regs->iicstat = 0xd0;
s3c2440_i2c_regs->iiccon = 0xaf;
ndelay(50); // 等待一段时间以便P信号已经发出
}
/* 唤醒 */
wake_up(&s3c2440_i2c_xfer_data.wait);
}
static int s3c2440_i2c_xfer(struct i2c_adapter *adap,
struct i2c_msg *msgs, int num)
{
unsigned long timeout;
/* 把num个msg的I2C数据发送出去/读进来 */
s3c2440_i2c_xfer_data.msgs = msgs;
s3c2440_i2c_xfer_data.msn_num = num;
s3c2440_i2c_xfer_data.cur_msg = 0;
s3c2440_i2c_xfer_data.cur_ptr = 0;
s3c2440_i2c_xfer_data.err = -ENODEV;
s3c2440_i2c_start();
/* 休眠 */
timeout = wait_event_timeout(s3c2440_i2c_xfer_data.wait, (s3c2440_i2c_xfer_data.state == STATE_STOP), HZ * 5);
if (0 == timeout)
{
printk("s3c2440_i2c_xfer time out\n");
return -ETIMEDOUT;
}
else
{
return s3c2440_i2c_xfer_data.err;
}
}
static u32 s3c2440_i2c_func(struct i2c_adapter *adap)
{
return I2C_FUNC_I2C | I2C_FUNC_SMBUS_EMUL | I2C_FUNC_PROTOCOL_MANGLING;
}
static const struct i2c_algorithm s3c2440_i2c_algo = {
// .smbus_xfer = ,
.master_xfer = s3c2440_i2c_xfer,
.functionality = s3c2440_i2c_func,
};
/* 1. 分配/设置i2c_adapter
*/
static struct i2c_adapter s3c2440_i2c_adapter = {
.name = "s3c2440_100ask",
.algo = &s3c2440_i2c_algo,
.owner = THIS_MODULE,
};
static int isLastMsg(void)
{
return (s3c2440_i2c_xfer_data.cur_msg == s3c2440_i2c_xfer_data.msn_num - 1);
}
static int isEndData(void)
{
return (s3c2440_i2c_xfer_data.cur_ptr >= s3c2440_i2c_xfer_data.msgs->len);
}
static int isLastData(void)
{
return (s3c2440_i2c_xfer_data.cur_ptr == s3c2440_i2c_xfer_data.msgs->len - 1);
}
static irqreturn_t s3c2440_i2c_xfer_irq(int irq, void *dev_id)
{
unsigned int iicSt;
iicSt = s3c2440_i2c_regs->iicstat;
if(iicSt & 0x8){ printk("Bus arbitration failed\n\r"); }
switch (s3c2440_i2c_xfer_data.state)
{
case STATE_START : /* 发出S和设备地址后,产生中断 */
{
PRINTK("Start\n");
/* 如果没有ACK, 返回错误 */
if (iicSt & S3C2410_IICSTAT_LASTBIT)
{
s3c2440_i2c_stop(-ENODEV);
break;
}
if (isLastMsg() && isEndData())
{
s3c2440_i2c_stop(0);
break;
}
/* 不是最后一个消息,进入下一个状态 */
if (s3c2440_i2c_xfer_data.msgs->flags & I2C_M_RD) /* 读 */
{
s3c2440_i2c_xfer_data.state = STATE_READ;
goto next_read;
}
else
{
s3c2440_i2c_xfer_data.state = STATE_WRITE;
}
}
case STATE_WRITE:
{
PRINTK("STATE_WRITE\n");
/* 如果没有ACK, 返回错误 */
if (iicSt & S3C2410_IICSTAT_LASTBIT)
{
s3c2440_i2c_stop(-ENODEV);
break;
}
if (!isEndData()) /* 如果当前msg还有数据要发送 */
{
s3c2440_i2c_regs->iicds = s3c2440_i2c_xfer_data.msgs->buf[s3c2440_i2c_xfer_data.cur_ptr];
s3c2440_i2c_xfer_data.cur_ptr++;
// 将数据写入IICDS后,需要一段时间才能出现在SDA线上
ndelay(50);
s3c2440_i2c_regs->iiccon = 0xaf; // 恢复I2C传输
break;
}
else if (!isLastMsg())
{
/* 开始处理下一个消息 */
s3c2440_i2c_xfer_data.msgs++;
s3c2440_i2c_xfer_data.cur_msg++;
s3c2440_i2c_xfer_data.cur_ptr = 0;
s3c2440_i2c_xfer_data.state = STATE_START;
/* 发出START信号和发出设备地址 */
s3c2440_i2c_start();
break;
}
else
{
/* 是最后一个消息的最后一个数据 */
s3c2440_i2c_stop(0);
break;
}
break;
}
case STATE_READ:
{
PRINTK("STATE_READ\n");
/* 读出数据 */
s3c2440_i2c_xfer_data.msgs->buf[s3c2440_i2c_xfer_data.cur_ptr] = s3c2440_i2c_regs->iicds;
s3c2440_i2c_xfer_data.cur_ptr++;
next_read:
if (!isEndData()) /* 如果数据没读写, 继续发起读操作 */
{
if (isLastData()) /* 如果即将读的数据是最后一个, 不发ack */
{
s3c2440_i2c_regs->iiccon = 0x2f; // 恢复I2C传输,接收到下一数据时无ACK
}
else
{
s3c2440_i2c_regs->iiccon = 0xaf; // 恢复I2C传输,接收到下一数据时发出ACK
}
break;
}
else if (!isLastMsg())
{
/* 开始处理下一个消息 */
s3c2440_i2c_xfer_data.msgs++;
s3c2440_i2c_xfer_data.cur_msg++;
s3c2440_i2c_xfer_data.cur_ptr = 0;
s3c2440_i2c_xfer_data.state = STATE_START;
/* 发出START信号和发出设备地址 */
s3c2440_i2c_start();
break;
}
else
{
/* 是最后一个消息的最后一个数据 */
s3c2440_i2c_stop(0);
break;
}
break;
}
default: break;
}
/* 清中断 */
s3c2440_i2c_regs->iiccon &= ~(S3C2410_IICCON_IRQPEND);
return IRQ_HANDLED;
}
/*
* I2C初始化
*/
static void s3c2440_i2c_init(void)
{
struct clk *clk;
clk = clk_get(NULL, "i2c");
clk_enable(clk);
// 选择引脚功能:GPE15:IICSDA, GPE14:IICSCL
s3c_gpio_cfgpin(S3C2410_GPE(14), S3C2410_GPE14_IICSCL);
s3c_gpio_cfgpin(S3C2410_GPE(15), S3C2410_GPE15_IICSDA);
/* bit[7] = 1, 使能ACK
* bit[6] = 0, IICCLK = PCLK/16
* bit[5] = 1, 使能中断
* bit[3:0] = 0xf, Tx clock = IICCLK/16
* PCLK = 50MHz, IICCLK = 3.125MHz, Tx Clock = 0.195MHz
*/
s3c2440_i2c_regs->iiccon = (1<<7) | (0<<6) | (1<<5) | (0xf); // 0xaf
s3c2440_i2c_regs->iicadd = 0x10; // S3C24xx slave address = [7:1]
s3c2440_i2c_regs->iicstat = 0x10; // I2C串行输出使能(Rx/Tx)
}
static int i2c_bus_s3c2440_init(void)
{
/* 2. 硬件相关的设置 */
s3c2440_i2c_regs = ioremap(0x54000000, sizeof(struct s3c2440_i2c_regs));
s3c2440_i2c_init();
request_irq(IRQ_IIC, s3c2440_i2c_xfer_irq, 0, "s3c2440-i2c", NULL);
init_waitqueue_head(&s3c2440_i2c_xfer_data.wait);
/* 3. 注册i2c_adapter */
i2c_add_adapter(&s3c2440_i2c_adapter);
return 0;
}
static void i2c_bus_s3c2440_exit(void)
{
i2c_del_adapter(&s3c2440_i2c_adapter);
free_irq(IRQ_IIC, NULL);
iounmap(s3c2440_i2c_regs);
}
module_init(i2c_bus_s3c2440_init);
module_exit(i2c_bus_s3c2440_exit);
MODULE_LICENSE("GPL");
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
make uImage 编译内核,加载新内核后重新启动。
装载驱动成功
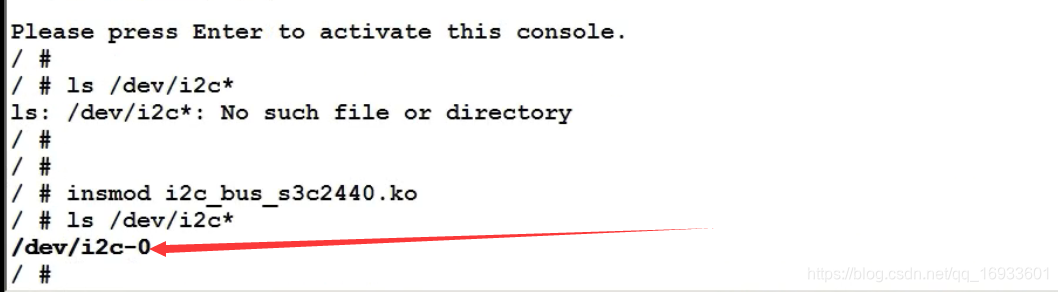
读写测试

文章来源: blog.csdn.net,作者:嵌入式与Linux那些事,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/qq_16933601/article/details/103963865

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)