【树莓派4B学习】十二、摄像头辅助opencv实现巡线

【摘要】
一、基础知识
二值化操作
首先看一个常用的图像处理操作“二值化” , opencv 提供了多种二值化形式:
cv2.THRESH_BINARY
cv2.THRESH_BINARY_INV
c...
一、基础知识
二值化操作
首先看一个常用的图像处理操作“二值化” , opencv 提供了多种二值化形式:
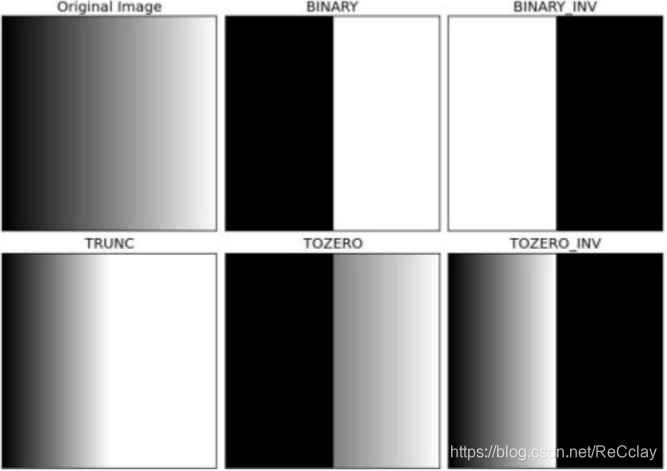
- cv2.THRESH_BINARY
- cv2.THRESH_BINARY_INV
- cv2.THRESH_TRUNC
- cv2.THRESH_TOZERO
- cv2.THRESH_TOZERO_INV
在灰度图像中, 0-255 代表着亮度等级, 黑色为 0, 白色为 255。 标准的二值化就是根据设定的亮度阈值, 将超过这个亮度的点赋值为白色的 255, 低于这个阈值的点赋值为黑色的0。
目前做巡黑线, 使用正常模式 cv2.THRESH_BINARY。 如果是巡白线, 就只需要修改成反色模式cv2.THRESH_BINARY_INV 就可以将白色线条转换成黑色点来用同一个程序了。
这几种操作的效果不同, 下图是一个灰度图在阈值为 127 下对应的输出图像
二、示例代码
#coding:utf-8
#Python中声明文件编码的注释,编码格式指定为utf-8
from socket import *
from time import ctime
import binasci
- 1
- 2
- 3
- 4
文章来源: recclay.blog.csdn.net,作者:ReCclay,版权归原作者所有,如需转载,请联系作者。
原文链接:recclay.blog.csdn.net/article/details/103717133

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)