ARM裸机开发:汇编LED灯实验(I.MX6UL芯片)

ARM裸机开发:汇编LED灯实验(I.MX6UL芯片)
一、I.MX6UL的GPIO原理
研究IMX6UL GPIO 原理前先回忆一下STM32GPIO配置流程,其主要分为4个步骤:
- 使能指定 GPIO 的时钟。
- 初始化 GPIO,如输出功能、上拉、速度等
- 是否开启 IO 复用将IO作为其它外设 引脚使用
- 设置初始输出的电平高低
下面我们学习 IMX6UL 的 GPIO 原理也是按照这样的流程来学习
1.1 I.MX6UL IO命名
学习前先了解一下 IMX 的命名方式,在以前学STM32时他的 IO 口是按照一组一组来命名的,如PA是一组,一组里面有16个 IO 口即 PA0-PA15;而在 IMX6UL里面命名方式则大不一样,I.MX6UL 的 IO 主要分为两类:SNVS 域IO和通用 IO
SNVC域 IO 命名: IOMUXC_SNVC_SW_MUX_CTL_PAD_XX_XX,后面的 XX_XX 就是 GPIO 命名, 比如:BOOT_MODE0 等等
通用 IO 命名: IOMUXC_SW_MUX_CTL_PAD_XX_XX,后面的 XX_XX 就是 GPIO 命名, 比如:GPIO1_IO01、UART1_TX_DATA、JTAG_MOD 等等
具体IO文档可以参考 IMX6UL 官方文档
1.2 I.MX6UL IO复用
IO 复用是通过一个寄存器来控制的,这里我以 IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO00 为例子,翻阅手册可以看到一个 IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO01 的32位寄存器,寄存器如下:
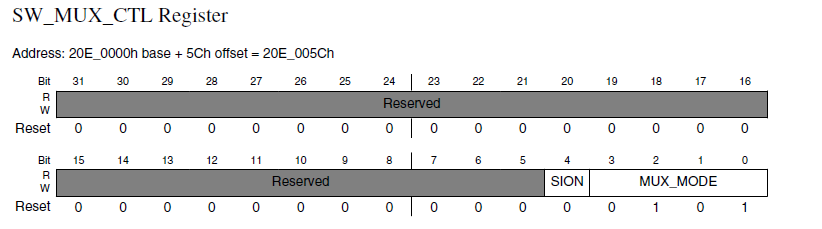
可以看到寄存器的地址为 20E_005CH 低5位用于模式控制分为 SION 和 MUX_MODE,其他的则是保留位
MUX_MODE 的0到3位对应具体模式,具体有以下几个:
| MUX_MODE | 复用模式 |
|---|---|
| 0000 | ALT0 复用为 IIC2_SCL |
| 0001 | ALT1 复用为 GPT1_CAPTURE1 |
| 0010 | ALT2 复用为 ANATOP_OTG1_ID |
| 0011 | ALT3 复用为 ENET1_REF_CLK1 |
| 0100 | ALT4 复用为 MQS_RIGHT |
| 0101 | ALT5 复用为 GPIO1_IO00 |
| 0110 | ALT6 复用为 ENET1_1588_EVENT0_IN |
| 0111 | ALT7 复用为 SRC_SYSTEM_RESET |
| 1000 | ALT8 复用为 WDOG3_WDOG_B |
SION 的控制功能如下:
| SION | 功能 |
|---|---|
| 0 | IO输入路径按照复用的模式来 |
| 1 | IO输入路径强制按照GPIO1——IO00来 |
以上就是 IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO00 的复用寄存器一个简单的介绍,不同的 IO 他的复用寄存器不完全相同,需要根据手册具体去查询
I.MX6U 的 GPIO 一共有 5 组:GPIO1、GPIO2、GPIO3、GPIO4 和 GPIO5, 其中 GPIO1 有 32 个 IO,GPIO2 有 22 个 IO,GPIO3 有 29 个 IO、GPIO4 有 29 个 IO,GPIO5 有 12 个 IO,一共有 124 个 GPIO
1.3 I.MX6UL IO配置
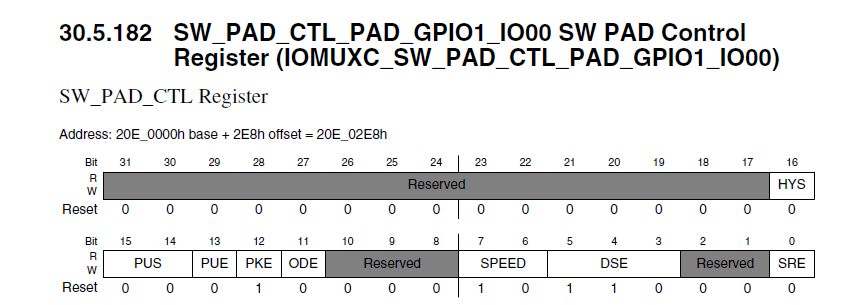
1.2 讲述的是 IO 口的复用配置寄存器,但 IO 的具体工作配置还有另外一个寄存器进行控制,继续以 GPIO1 组的 IO00 为例子;具体 IO 工作配置寄存器由 IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO00 控制,该寄存器如下:
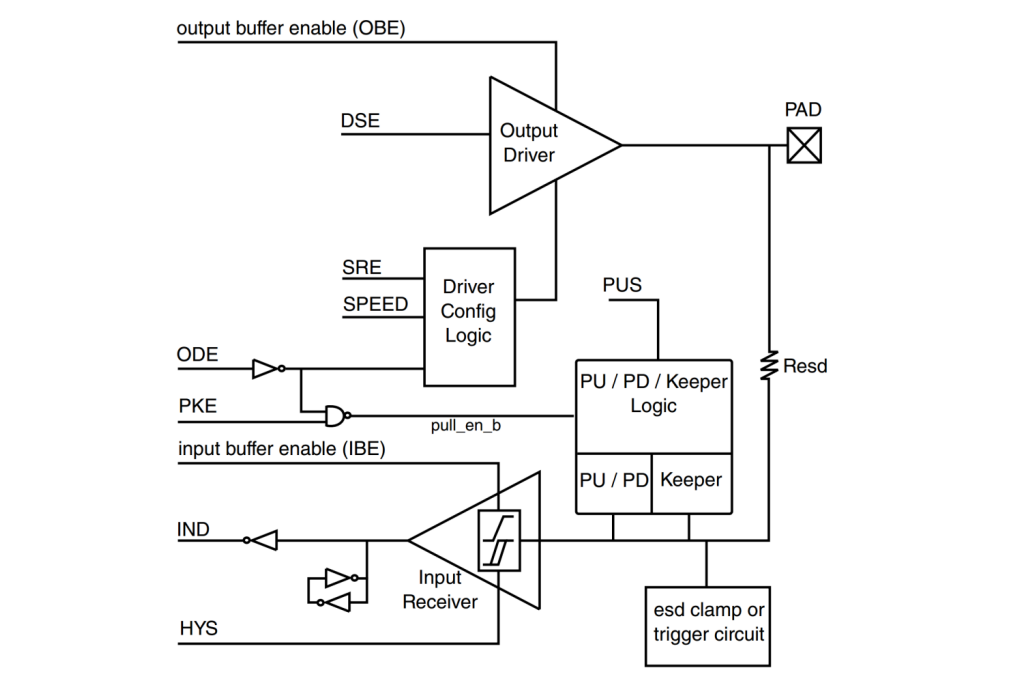
其不同位控制的 IO 配置功能不同,需要结合 IO 的工作原理图来理解,上 IO 原理图:
寄存器分析:
HYS(bit16): 对应图中 HYS,用来使能迟滞比较器,在 IO 输入时有效,可以用来对输入波形进行处理,关于迟滞比较器可以看这篇文章 : 迟滞比较器;HYS 为 0 的时候禁止迟滞比较器,为 1 的时候使能迟滞比较器
PUS(bit15:14): 图中的 PUS,用来设置上下拉电阻的:
| 位 | 功能 |
|---|---|
| 00 | 100k 下拉 |
| 01 | 47k 上拉 |
| 10 | 100k 上拉 |
| 11 | 22k 上拉 |
PUE(bit13): 上图没有显示,当 IO 作为输入的时候,这个位用来设置 IO 是使用上下拉还是使用状态保持器。为 0 的时候使用状态保持器,当为 1 的时候使用上下拉。
状态保持器在 IO 作为输入的时候才有用,当外部电路断电以后此 IO 口可以保持住之前状态。
PKE(bit12): 对应图中的 PKE,此位用来使能或者禁止上下拉或者状态保持器功能,为 0 时禁止上下拉/状态保持器,为 1 时使能上下拉和状态保持器。
ODE(bit11): 对应图中的 ODE,当 IO 作为输出的时候,此位用来禁止或者使能开路输出,此位为 0 的时候禁止开路输出,当此位为 1 的时候就使能开路输出功能。
SPEED(bit7:6): 对应图中的 SPEED,当 IO 用作输出的时候,此位用来设置 IO 速度
| 位设置 | 速度 |
|---|---|
| 00 | 低速 50M |
| 01 | 中速 100M |
| 10 | 中速 100M |
| 11 | 最大速度 200M |
DSE(bit5:3): 对应图中 DSE,当 IO 用作输出的时候用来设置 IO 的驱动能力, 总共有 8 个可选选项,如表所示:
(3.3V 下 R0 是 260Ω,1.8V 下 R0 是 150Ω,接 DDR 的时候是 240Ω)
| 位设置 | 速度 |
|---|---|
| 000 | 输出驱动关闭 |
| 001 | R0 **** |
| 010 | R0/2 |
| 011 | R0/3 |
| 100 | R0/4 |
| 101 | R0/5 |
| 110 | R0/6 |
| 111 | R0/7 |
SRE(bit0): 对应图中的 SRE,设置压摆率,当此位为 0 的时候是低压摆率,当为 1 的时候是高压摆率。
压摆率就是 IO 电平跳变所需要的时间,比如从 0 到 1 需要多少时 间,时间越小波形就越陡,说明压摆率越高;反之,时间越多波形就越缓,压摆率就越低。高速信号压摆率要高,速度快;而要考虑电磁兼容性的话压摆率要低
压摆率参考文章:运放压摆率
1.4 I.MX6UL GPIO配置
1.2 和 1.3 讲了IO 的复用与功能寄存器配置,1.4 小节分析 IO 众多复用里面的一种 GPIO 的具体配置
首先看一下 GPIO 的结构图:
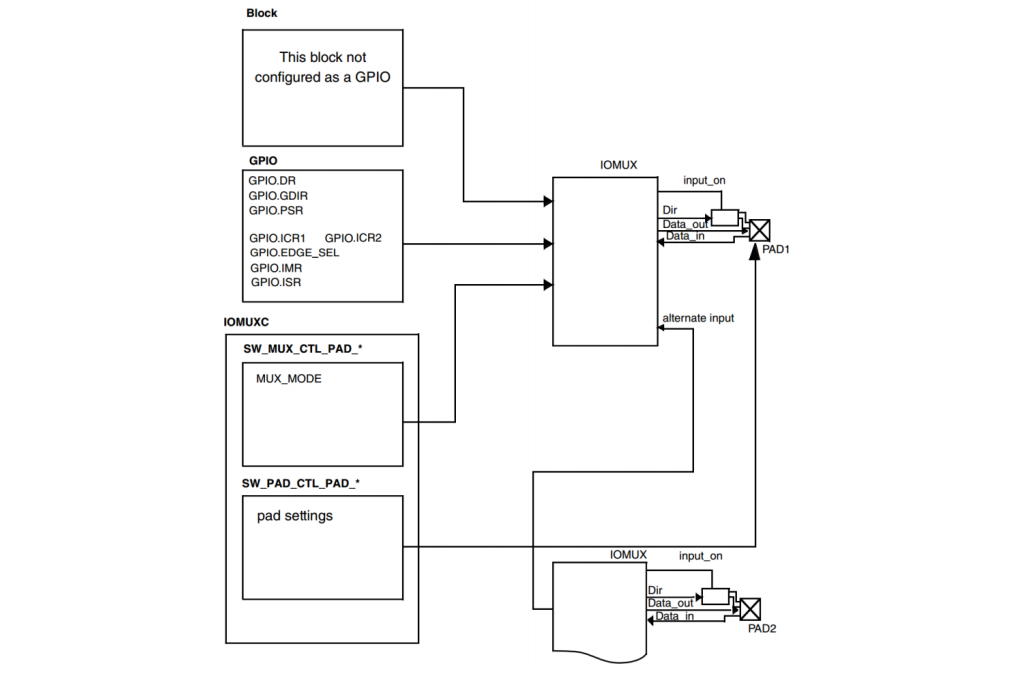
结构中可以看到 IOMUXC 里面有 SW_MUX_CTL_PAD_* 和 SW_PAD_CTL_PAD__* 两个寄存器用于配置 IO;而单独的 GPIO 配置则是另外 8 个 GPIO 自己的寄存器进行配置;
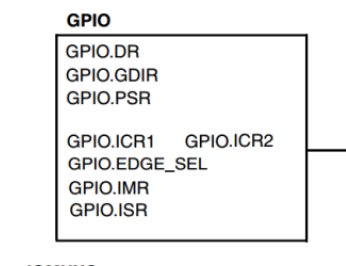
这 8 个寄存器介绍如下:
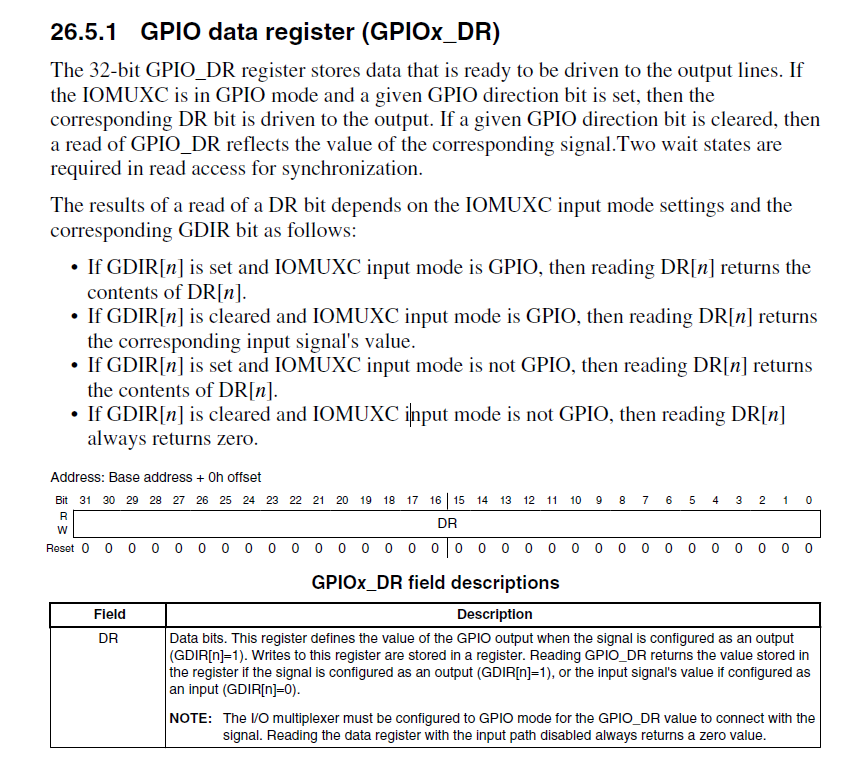
首先看 GPIOx_DR 数据寄存器,由翻译可以看到,DR 寄存器在 IO 的模式设置为 GPIO 且 GPIO 的输入输出方向确定好后,输出状态时 DR 寄存器里面的位可以控制 GPIO 的输出值,输入时则存储输入的状态值,通过读取可以获取 GPIO 状态,比如当 GPIO1_IO00 引脚接地,那么 GPIO1.DR 的 bit0 就是 0
GPIOx_IR 方向寄存器,结构如下:
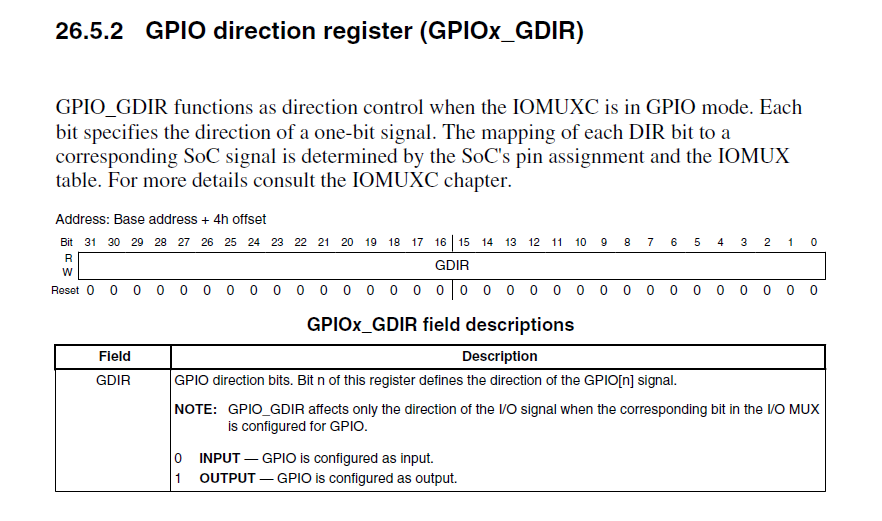
GPIO_GDIR 作为方向控制,每个位指定了一位信号的方向,此寄存器用来设置某个 IO 的工作方向,是输入还是输出。同 样的,每个 IO 对应一个位,如果要设置 GPIO 为输入的话就设置相应的位为 0,如果要设置为输出的话就设置为 1
PSR 寄存器: GPIO 的状态寄存器
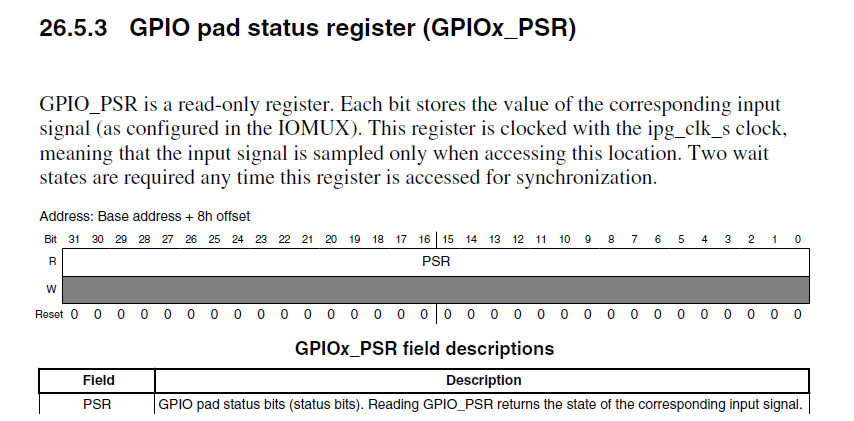

PSR 寄存器也是一个 GPIO 对应一个位,读取相应的位即可获取对应的 GPIO 的状态,也就是 GPIO 的高低电平值,功能和输入状态下的 DR 寄存器一样
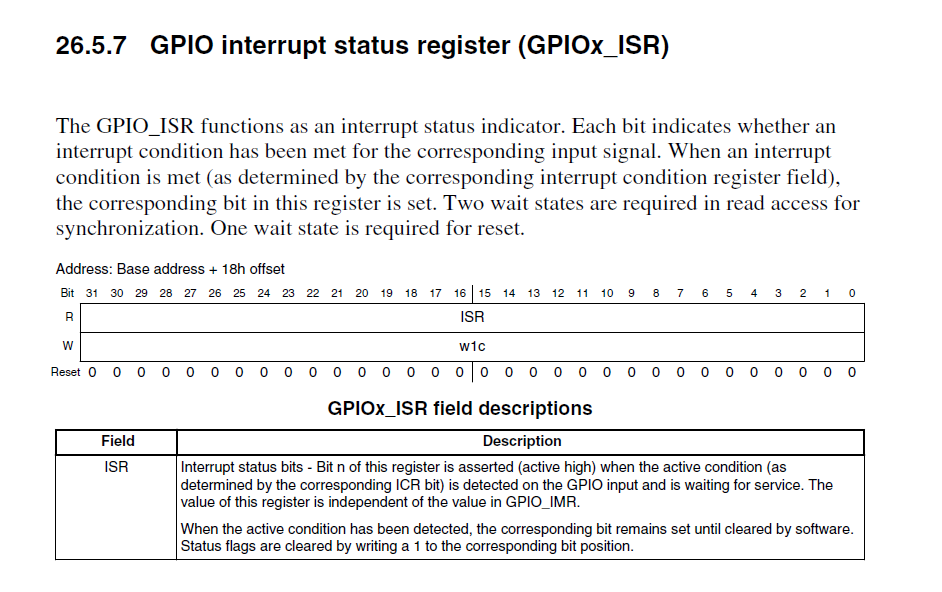
ICR1和ICR2 是中断控制寄存器, ICR1用于配置低16个GPIO, ICR2 用于配置高 16 个 GPIO,以 ICR1 为例子:寄存器结构如下:
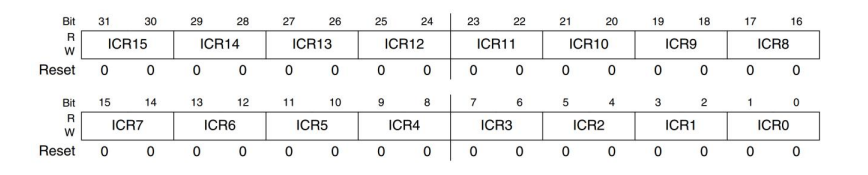
两位一组控制一个 GPIO 的中断,和 STM32 的中断类似,每一组可配置的选线如下:
| 位设置 | 速度 |
|---|---|
| 00 | 低电平触发 |
| 01 | 高电平触发 |
| 10 | 上升沿触发 |
| 11 | 下降沿触发 |
比如要设置 GPIO1_IO15 为上升沿触发中断,那么使用 GPIO1.ICR1=2<<30 就可以设置
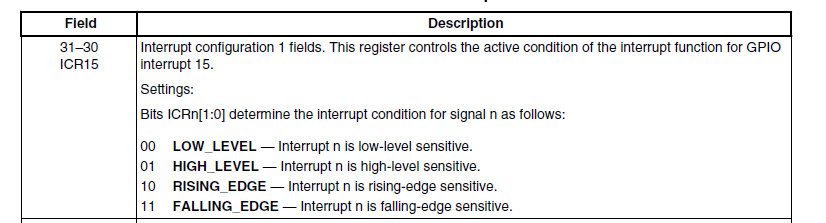
IMR : 中断屏蔽寄存器,一个 GPIO 对应一个位,IMR 寄存器用来控制 GPIO 的中断禁止和使能,1 对应中断使能,0 则是禁止
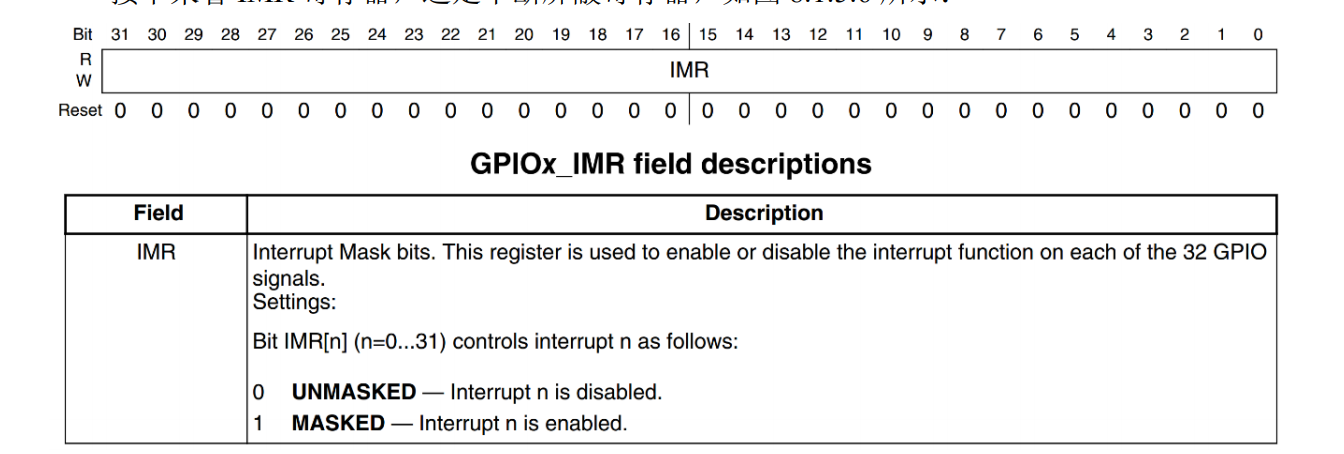
**ISR 是中断状态寄存器 ** :一个 GPIO 对应一个位,只要某个 GPIO 的中断发生,那么 ISR 中相应的位就会被置 1,通过读取值判断中断有没有发生
注意:处理完中断以后,必须清除中断标志位,清除方法就是向 ISR 中相应的位写 1 清零
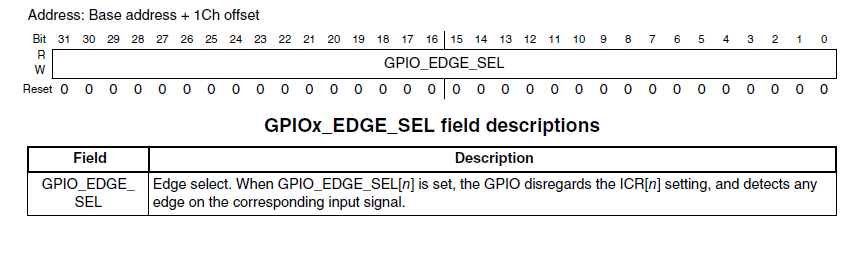
EDGE_SEL 寄存器用来设置边沿中断,该寄存器会覆盖 ICR1 和 ICR2 的设置,同样是一 个 GPIO 对应一个位。如果相应的位被置 1,那么就相当与设置了对应的 GPIO 是上升沿和下降 沿(双边沿)触发,寄存器如下
1.5 I.MX6UL时钟使能
I.MX6U 有复杂的时钟系统,每个外设的时钟都可以独立的使能或禁止,这样可以关闭掉不使用的外设时钟,起到 省电的目的,时钟系统后面学习到在分析,当前先研究 IO 时钟如何使能
时钟系统有关的模块叫做 Clock Controller Module(CCM) ,其中控制时钟使能的寄存器为CCM_CCGR0~CCM_CCGR6 这 7 个寄存器,这 7 个寄存器控制着 I.MX6U 的所有外设时钟开关,CCM_CCGR0 结构体如图:
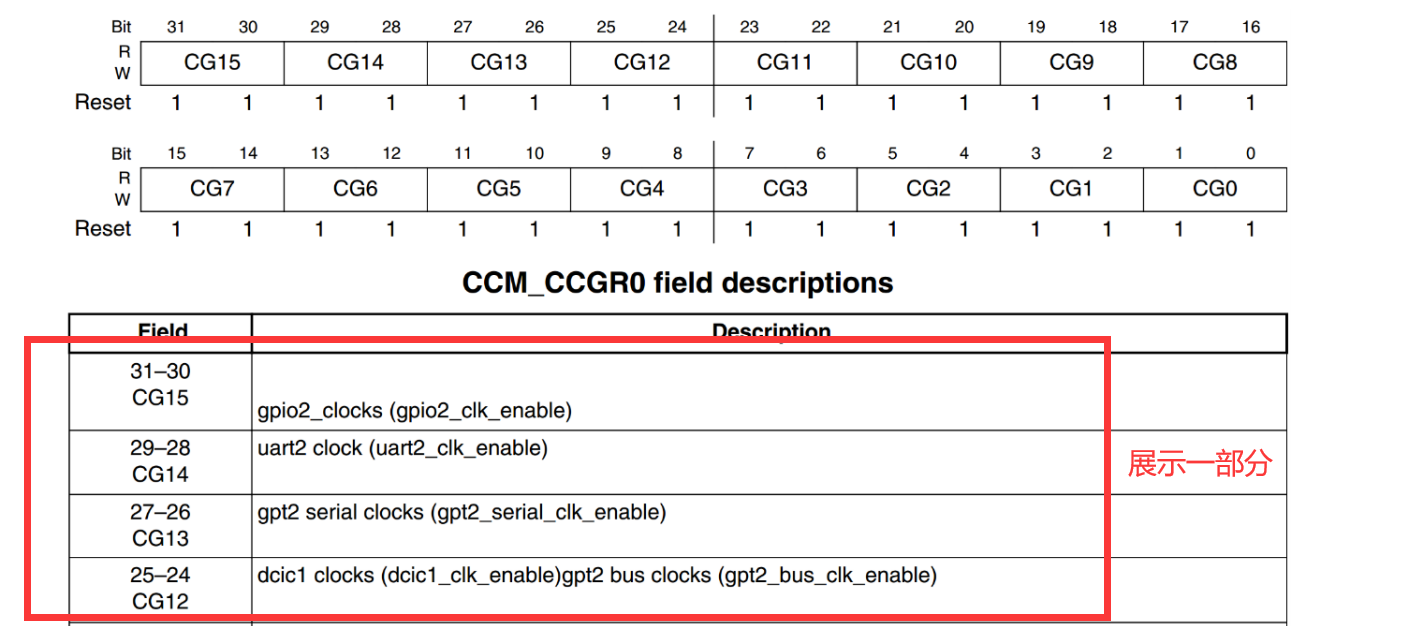
每 2 位控制一个外设的时钟,控制功能如下:
| 位设置 | 时钟控制 |
|---|---|
| 00 | 所有模式下都关闭外设时钟。 |
| 01 | 只有在运行模式下打开外设时钟,等待模式和停止模式下均关闭外设时钟。 |
| 10 | 未使用(保留位)。 |
| 11 | 除了停止模式以外,其他所有模式下时钟都打开。 |
要使能对应的时钟只要置位对应的时钟控制位就行!
二、开发板原理图
正点原子阿尔法LED灯原理图如下:
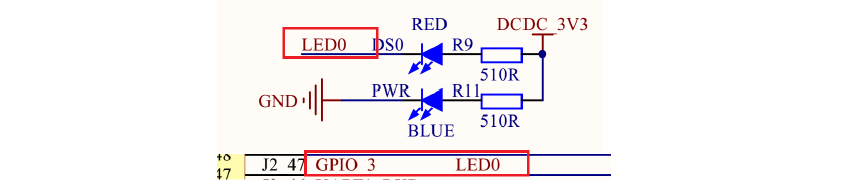
LED0 接到了 GPIO_3 上,GPIO_3 就是 GPIO1_IO03
三、程序编写
程序编写按照下面的流程进行编写:
- 使能IO时钟
- 设置IO复用功能
- 配置IO运行功能
- 配置具体GPIO寄存器
- 设置输入输出
- 使能IO时钟
配置 CCM 的 CCGR0-6 寄存器,开启所有时钟
读取立即数到 R0 、 R1,通过寄存器间接寻址将 R1 的值赋值给目标地址
ldr r0, =0X020C4068 # CCGR0
ldr r1, =0XFFFFFFFF
str r1, [r0]
ldr r0, =0X020C406C # CCGR1
str r1, [r0]
ldr r0, =0X020C4070 # CCGR2
str r1, [r0]
ldr r0, =0X020C4074 # CCGR3
str r1, [r0]
ldr r0, =0X020C4078 # CCGR4
str r1, [r0]
ldr r0, =0X020C407C # CCGR5
str r1, [r0]
ldr r0, =0X020C4080 # CCGR6
str r1, [r0]
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 设置IO复用功能
ldr r0, =0X020E0068 # 将寄存器 SW_MUX_GPIO1_IO03_BASE 地址加载到 r0 中
ldr r1, =0X5
str r1,[r0] # 设置寄存器 SW_MUX_GPIO1_IO03_BASE 的 MODE 为5
- 1
- 2
- 3
- 配置IO运行功能
# 模式配置
# bit 16:0 HYS关闭
# bit [15:14]: 00 默认下拉
# bit [13]: 0 kepper功能
# bit [12]: 1 pull/keeper使能
# bit [11]: 0 关闭开路输出
# bit [7:6]: 10 速度100Mhz
# bit [5:3]: 110 R0/6驱动能力
# bit [0]: 0 低转换率
# 寄存器 SW_PAD_GPIO1_IO03_BASE
ldr r0, =0X020E02F4
ldr r1, =0X10B0
str r1,[r0]
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 配置具体GPIO寄存器
# 寄存器GPIO1_GDIR
ldr r0, =0X0209C004
# 配置为输出模式
ldr r1, =0X0000008
str r1,[r0]
- 1
- 2
- 3
- 4
- 5
- 设置GPIO输入输出值
# 寄存器GPIO1_DR
ldr r0, =0X0209C000
# 输出低电平
ldr r1, =0
str r1,[r0]
- 1
- 2
- 3
- 4
- 5
在开头添加一个全局入口声明代码
.global _start
_start
# 需要运行的代码
- 1
- 2
- 3
- 4
结尾加一个死循环,防止程序结束
loop:
b loop
- 1
- 2
四、编译下载
编译使用 makefile 进行编译链接得到 .elf 文件,之后转化为 .bin 文件,通过 imxdownload 到 sd 下插到开发板上进行 SD 启动,具体步骤可以参考我之前的文章: Linux驱动开发:I.MX6UL 程序编译下载(SD卡)
五、实验现象
下载程序后,LED 灯点亮

文章来源: blog.csdn.net,作者:JeckXu666,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/qq_45396672/article/details/120029649

- 点赞
- 收藏
- 关注作者
评论(0)