准确率,召回率,F1 值、ROC,AUC、mse,mape评价指标

【摘要】
在机器学习、数据挖掘领域,工业界往往会根据实际的业务场景拟定相应的业务指标。本文旨在一起学习比较经典的三大类评价指标,其中第一、二类主要用于分类场景、第三类主要用于回归预测场景,基本思路是从概念公式,到优缺点,再到具体应用(分类问题,本文以二分类为例)。
1.准确率P、召回率R、F1 值
定义
准确率(Precis...
在机器学习、数据挖掘领域,工业界往往会根据实际的业务场景拟定相应的业务指标。本文旨在一起学习比较经典的三大类评价指标,其中第一、二类主要用于分类场景、第三类主要用于回归预测场景,基本思路是从概念公式,到优缺点,再到具体应用(分类问题,本文以二分类为例)。
1.准确率P、召回率R、F1 值
- 定义
- 准确率(Precision):P=TP/(TP+FP)。通俗地讲,就是预测正确的正例数据占预测为正例数据的比例。
- 召回率(Recall):R=TP/(TP+FN)。通俗地讲,就是预测为正例的数据占实际为正例数据的比例
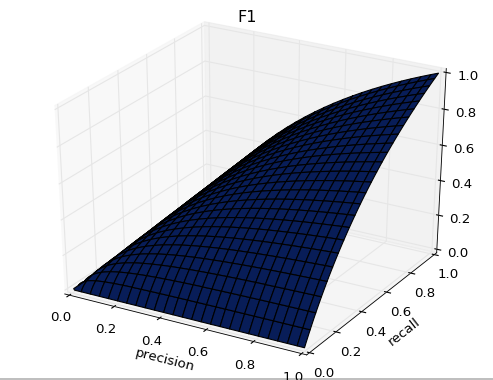
- F1值(F score):

- 思考
- 正如下图所示,F1的值同时受到P、R的影响,单纯地追求P、R的提升并没有太大作用。在实际业务工程中,结合正负样本比,的确是一件非常有挑战的事。
- 图像展示
- 下面附上源码
-
-
import numpy as np
-
import matplotlib.pyplot as plt
-
from mpl_toolkits.mplot3d import Axes3D
-
from matplotlib import cm
-
-
fig = plt.figure()
-
ax = fig.add_subplot(111,projection='3d')
-
x = np.linspace(0,1,100)
-
p,r = np.meshgrid(x,x) #meshgrid函数创建一个二维的坐标网络
-
z = 2*p*r/(p+r)
-
ax.plot_surface(x,y,z,rstride=4,cstride=4,cmap=cm.YlGnBu_r)
-
ax.set_title('F1') #标题
-
ax.set_xlabel('precision') #x轴标签
-
ax.set_ylabel('recall') #y轴标签
-
plt.show()
-
2.ROC、AUC
- 概念
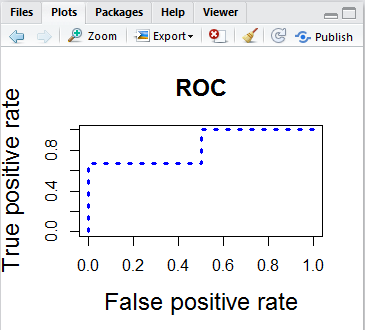
- TPR=TP/(TP+FN)=TP/actual positives
- FPR=FP/(FP+TN)=FP/actual negatives
- ROC是由点(TPR,FPR)组成的曲线,AUC就是ROC的面积。AUC越大越好。
- 一般来说,如果ROC是光滑的,那么基本可以判断没有太大的overfitting
- 图像展示
- 附上代码
-
-
library(ROCR)
-
p=c(0.5,0.6,0.55,0.4,0.7)
-
y=c(1,1,0,0,1)
-
pred = prediction(p, y)
-
perf = performance(pred,"tpr","fpr")
-
plot(perf,col="blue",lty=3, lwd=3,cex.lab=1.5, cex.axis=2, cex.main=1.5,main="ROC plot")
-

- python版本计算AUC
-
-
from sklearn import metrics
-
def aucfun(act,pred):
-
fpr, tpr, thresholds = metrics.roc_curve(act, pred, pos_label=1)
-
return metrics.auc(fpr, tpr)
-
- 直接利用AUC优化分类任务(R语言版)
下面是代码

-
-
#生成训练数据
-
set.seed(1999)
-
x1 = rnorm(1000)
-
x2 = rnorm(1000)
-
z = 1 + 2*x1 + 3*x2
-
pr = 1/(1+exp(-z))
-
y = rbinom(1000,1,pr)
-
-
#使用logloss作为训练目标函数
-
df = data.frame(y=y,x1=x1,x2=x2)
-
glm.fit=glm( y~x1+x2,data=df,family="binomial")
-
-
#下面使用auc作为训练目标函数
-
library(ROCR)
-
-
CalAUC <- function(real,pred){
-
rocr.pred=prediction(pred,real)
-
rocr.perf=performance(rocr.pred,'auc')
-
as.numeric(rocr.perf@y.values)
-
}
-
#初始值
-
beta0=c(1,1,1)
-
-
loss <- function(beta){
-
z=beta[1]+beta[2]*x1+beta[3]*x2
-
pred=1/(1+exp(-z))
-
-CalAUC(y,pred)
-
}
-
-
res=optim(beta0,loss,method = "Nelder-Mead",control = list(maxit = 100))
-
3.PRC、ROC比较
- AUC是ROC的积分(曲线下面积),是一个数值,一般认为越大越好,数值相对于曲线而言更容易当做调参的参照。
- PR曲线会面临一个问题,当需要获得更高recall时,model需要输出更多的样本,precision可能会伴随出现下降/不变/升高,得到的曲线会出现浮动差异(出现锯齿),无法像ROC一样保证单调性。
- 在正负样本分布得极不均匀(highly skewed datasets)的情况下,PRC比ROC能更有效地反应分类器的好坏。
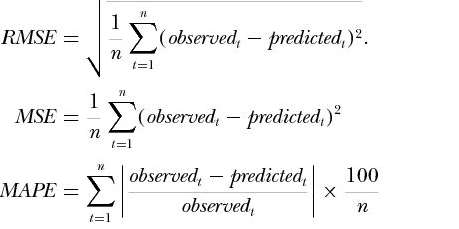
4.mape平均绝对百分误差
- 定义
- 技巧
- 在sklearn中,对于回归任务,一般都提供了mse损失函数(基于树的模型除外)。但有时我们会遇到sklearn中没有定义的损失函数,那么我们可以自定重写模型或者定义函数,下面以xgboost为模型,mape作为损失函数为例(grad、hess分别对应损失函数一阶导、二阶导)。
- 代码
-
-
def mapeobj(preds,dtrain):
-
gaps = dtrain.get_label()
-
grad = np.sign(preds-gaps)/gaps
-
hess = 1/gaps
-
grad[(gaps==0)] = 0
-
hess[(gaps==0)] = 0
-
return grad,hess
-
-
def evalmape(preds, dtrain):
-
gaps = dtrain.get_label()
-
err = abs(gaps-preds)/gaps
-
err[(gaps==0)] = 0
-
err = np.mean(err)
-
return 'error',err
-
文章来源: wenyusuran.blog.csdn.net,作者:文宇肃然,版权归原作者所有,如需转载,请联系作者。
原文链接:wenyusuran.blog.csdn.net/article/details/81221476

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)