超声波信标导航

祖婵:队长,听说今年信标对抗组中的信标是在前两年的红外+红光导引的方式上,又增加了导航声音信号。目的是为了提供与现场光线无关的导引信号,使得车模减少对现场光线的依靠。
对的。不过使用普通的声音信号也会受到现场环境噪音的影响。如果使用单一频率(俗称窄带信号)进行导航,虽然便于滤除环境噪音,但是会受到赛场四周墙壁反射的影响,使得反映信标位置的声音相位出现紊乱。现在组委会准备修改方案,在前两届的信标基础上,增加超声波导航信号。
为了更好理解超声波导航信号的机理。下面对于常使用到的超声波传感器做一些简单的实验分析。这样便于研究和设计超声导航方案。
祖禅:在其他竞赛赛题组中,我们使用过超声波探头。特别是在双车跟踪和超越组中使用过。当时是购买现场的超声测距成品模块用于检测前后车的距离,对于其机理不太清楚,只是知道超声波探头分为发射和接收两种探头。
是的,超声波传感器一般分为发射和接收两种探头。两种探头一般是由前端带有铁丝纱窗开口的圆柱形铝壳封装压电陶瓷片。压电现象是一个可逆物理现象:即可以有施加的电压产生机械振动,也可以由机械振动产生电压。因此也有发射和接收两种功能为一体的超声传感器。
超声波传感器如果使用普通的LCR表进行测量,会发现它呈现电容特性。电容值在几个nF左右。从外部端口特性分析超声波传感器,可以看成由电感,电容和电阻组成的网络。所以在不同的频率下,它对应的电抗是不同的。
但是如果使用网络阻抗分析仪测试,就会发现它会出现若干个谐振点。在谐振点的时候,传感器呈现纯电阻特性。

以下是测量两种不同的超声波探头的输入阻抗特性,绘制的是阻抗中纯电阻R对应的导纳数值。导纳越大,表示对应的阻抗越小。
由于压电陶瓷片在机械上具有不同的振动模态,所以谐振传感器对应的谐振频率也会有若干个。如下是从20kHz至100kHz频率范围内超声波探头导纳数值曲线。
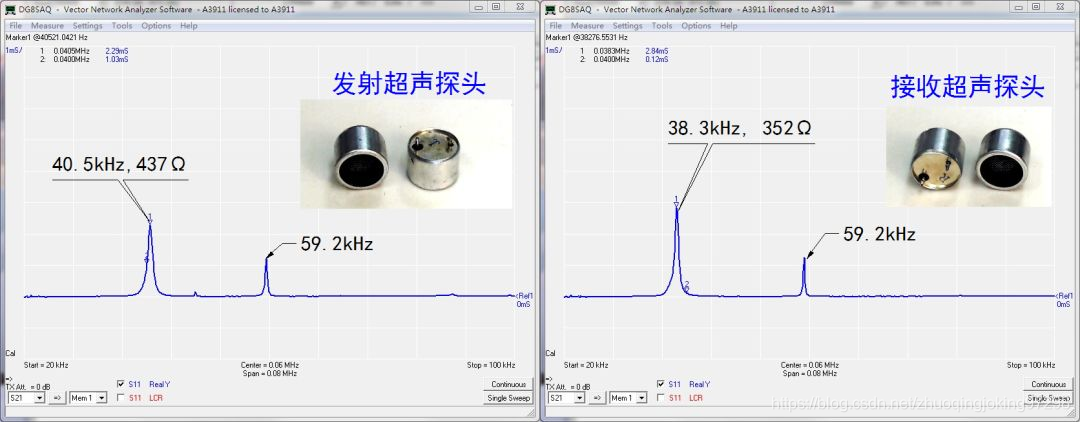
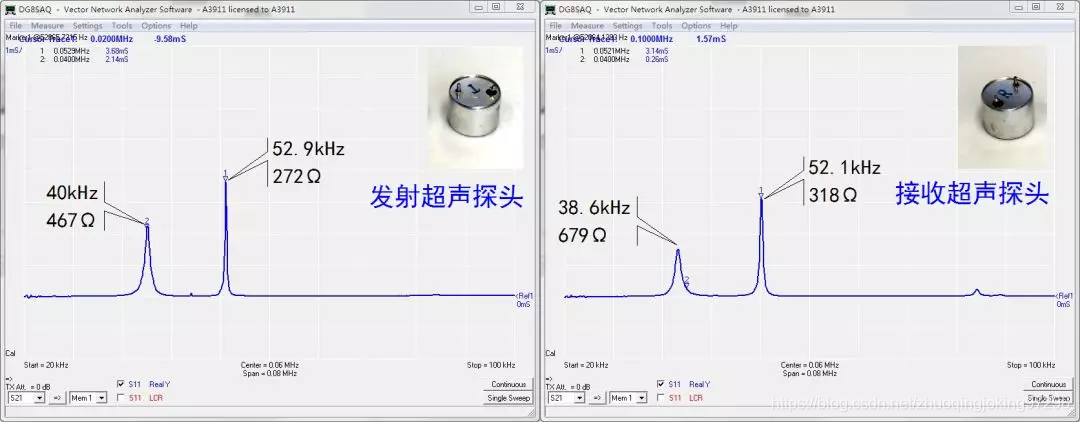
从上面阻抗结果来看,发射与接收探头在20kHz~100kHz之间都有两个谐振频率点。两种传感器的发射头的低频谐振点都是40kHz,但高频谐振点就有了比较大的区别。两个接收探头低频谐振点都是38kHz多一点,居然比发射谐振点低,这一点的确出乎我们的所料。为什么发射和接受探头的谐振点不同呢?
祖婵:如果接收探头谐振点偏离了发射信号(40kHz),会有什么坏处,又会有什么好处呢?
最直接的坏处就是降低了接收探头的灵敏度,在同样超声波信号下,所产生的压电信号就会减小很多。另外一个缺点就是增加了探头的输出阻抗。从面两个探头在它们谐振点出的阻抗分别是352欧姆和679欧姆。但是,在对应的40kHz处,输出阻抗就会增加很大,这也会使得输出信号进一步减小。
祖婵:刚才你只提到了坏处。我想问,这样会有什么好处吗?
说实在的,现在为止,我还没有想出有什么好处?为什么它们谐振点不同呢?
祖婵:造成发射和接收探头端口阻抗特性不同究竟与什么有关系呢?是否收到了传感器内收结构的影响?
我也很想知道,发射和接收探头之间究竟有什么区别。不如我们打开两个传感器瞧一瞧。
使用电动砂轮将铝外壳很轻松的就可以磨削出一条缝来。在这个过程中最好带着手套,或者将传感器放在夹持器具固定,然后再磨削。上面拍摄的动图,只是摆摆样子。不一会儿,传感器的外壳就会在磨削的过程中发热,烫的手无法拿住传感器。
撬开金属外壳,可以看到传感器包括有五个部分。其中最核心的就是压电陶瓷片组件(4),它是由铜片作为基板,上面涂有压电陶瓷材料,然后再陶瓷表面喷镀有电极。
压电陶瓷片的另一面带有一个弧面金属片,用于与空气进行机械能量交换。压电陶瓷片通过白色的固定胶与黑色塑料底座相连,引出电极也固定在底座上。由1,2,3,5金属配件组成的金属腔体提供了屏蔽和外壳保护作用。

仔细观察发射和接收的内部结构,外观上也没有看出有什么区别。只是压电陶瓷片与底座固定的白色胶的多少有差别,也许这会影响了两者机械振动谐振频率。
祖婵:既然从外观上看不出两者的区别,那么将来是否只能使用阻抗分析仪才能够从谐振频率上检测出两者的区别呢?
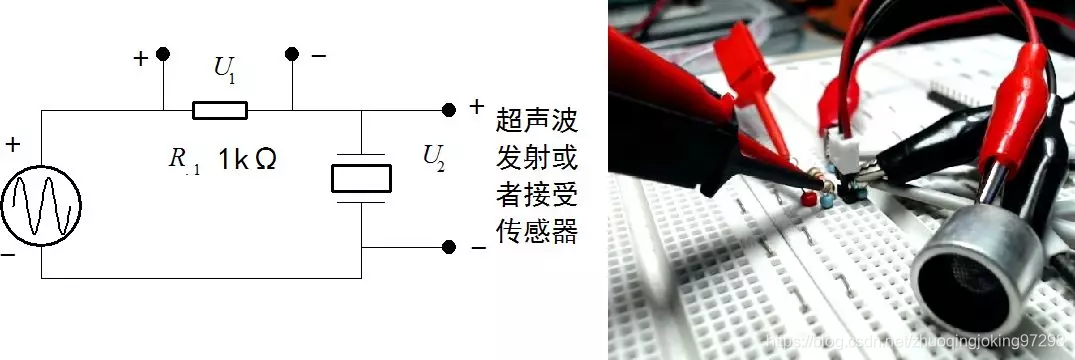
一般在在超声头的外壳中标有R或者T表示接受或者发送传感器。如果看不清楚,也可以将传感器与一个电阻串联,然后连接到一个普通的信号发生器的输出。测量电阻或者传感器上的电压随着频率的变化曲线。当出现变化突变的时候,就说明出现了谐振,这样,便可以得到对应的谐振频率点。如下就是测量发射和接收头在与1k欧姆电阻串联时,随着信号频率的变化,传感器上的交流电压变化情况。
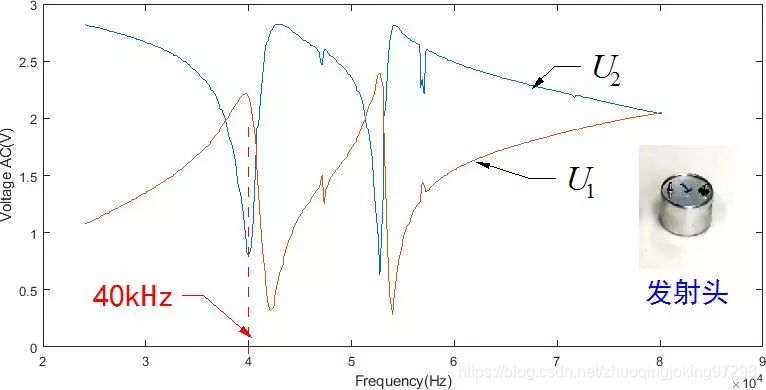
下面是发射头的电压变化曲线。可以看到出现了两次电压突变,对应着两个谐振频率点。其中频率低的突变反映了低频谐振频率40kHz。
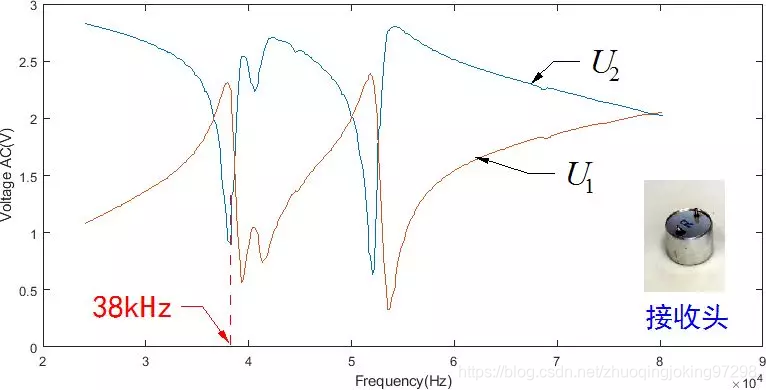
对于接受头同样可以测量到它的谐振频率。对应在38kHz的时候,出现了谐振。此时,接收头表现为低阻抗,分压就会出现最低值。
祖婵:既然发射和接收谐振点不同,那么还能够正常进行发送和接收吗?
由于发射和接收谐振具有一定的带宽,虽然他们中心点没有对齐,但是它们谐振曲线带宽有重叠,还是能够完成发送和接收信号的。
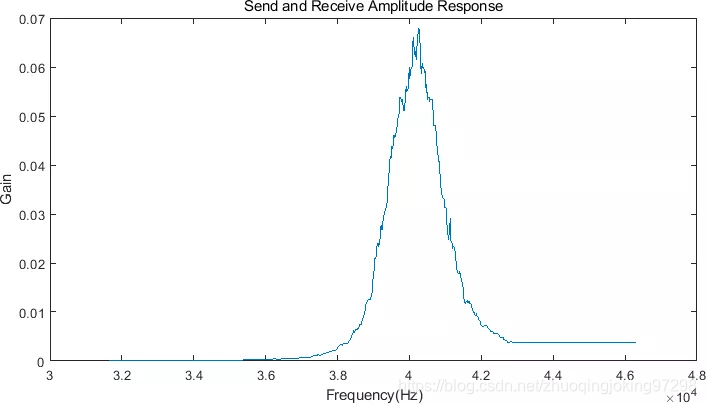
下面将发射和接收探头固定起来。然后施加不同的驱动信号,测量接收探头输出电压。就可以得到发送和接收系统的幅频特性曲线。它反映了发射与接收头之间信号传递增益随着频率变化而产生的变化。可以看到在40khz的时候,发射与接收信号增益是最大的。
下面将幅频特性在40kHz左右进一步拉开放大,可以大体观察到系统增益下降一半(3dB)对应的带宽是39kHz~41kHz。
祖婵:使用超声进行导航,相比于普通的声音,它会有怎样的抗干扰特性呢?
首先,在超声波范围呢,普通环境下的背景噪音就很小。另外,超声波的波长很短,对应40kHz,波长大约为0.7厘米。因此声音很容易被遮挡,衍射效应小。此外,发射和接收探头具有很强的方向特性,这样也会将来自不同方向的干扰进行空间滤除。
祖婵:既然超声波发射具有很强的指向性,那么如何保证在信标不同方向上,车模都能够接收到来自信标的超声波信号呢?
可以再新标一周按照不同方向安装多个发射探头来解决。这需要验证一个问题,就是发射探头究竟辐射宽度有多大?即在多大角度范围内,接收探头都可以很好的接收信号?
下面将发射探头放在一个舵机上,随着舵机转动不同的角度,测量前面接收探头输出信号的幅度。
通过观察,可以看到,随着发送探沟转动不同角度,接收信号会发生很大的变化。在发射和接收正对着的时候,接收信号最大。当发射往左右偏转的时候,接收信号都会下降。特别是当偏转角度达到90°的时候,接收信号就基本上降低为0了。
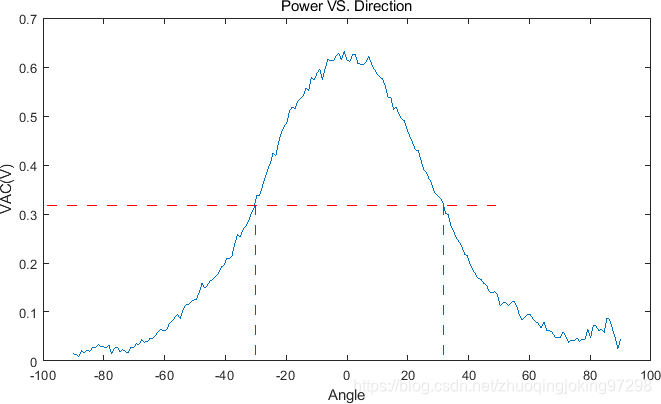
通过计算机采集在不同角度下接收的数据绘制成如下曲线,反映了发射探头的超声波辐射空间强度曲线。
当强度降低到一半的时候,对应角度为左右30°。因此,发射探头的辐射宽度在幅值降低3dB的时候,为60°。按照这个数据,只要在信标壳体四周每隔60°,安装一个发射探头,就可以大体保证在信标周围形成比较均匀的超声波信号了。
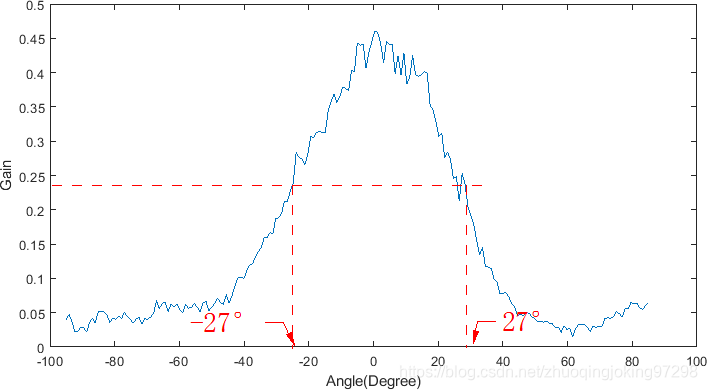
使用同样的方法,也可以测量接受探头的指向性。将发射探头固定不动,使用舵机转动接受探头的方向,可以测量到接收信号的幅值随着左右偏移角度的变化曲线。下图就是实际测量的一组数据。接收头的空间接收宽度也大概是60°左右。
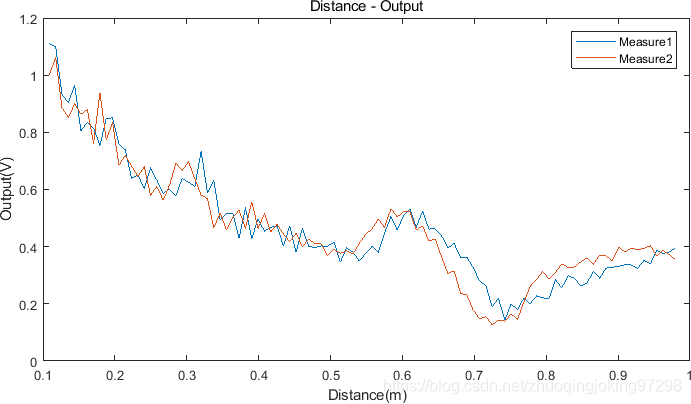
超声波具有很强的指向性,使得超声波的强度随着距离增加,下降速度变慢。下面利用一个直线导轨,承载这发射探头相对接收探头直线运动,通过这个装置可以测量随着发射和接收探头之间的距离变化,接收信号的强度变化曲线。
下图反映了两次在不同导轨摆放位置下,接收信号与距离之间的关系。在前期信号下降比较快,在后期,信号随着距离的衰减就不大了。其中出现了比较大的波动,估计是由空间形成的超声驻波引起的干扰。具体原因仍然无法解释。
祖婵:前面的测量都是使用的带有功率输出的信号源驱动发射探头发出超声信号的。我们使用单片机如何驱动超声发射头呢?
直接使用单片机的IO是无法得到强的驱动信号的。在普通的超声波模块中,有一种方案是巧妙的使用了MAX232芯片来驱动超声波发射头的。在MAX232中集成了两路RS232信号发送器。芯片本身通过电容开关方式将工作电压5V倍压和反压形成了正负10V的电源,使用MAX232对超声波探头进行差动驱动,可以获得等效正负20V的驱动信号,这样可以获得很强的输出信号。
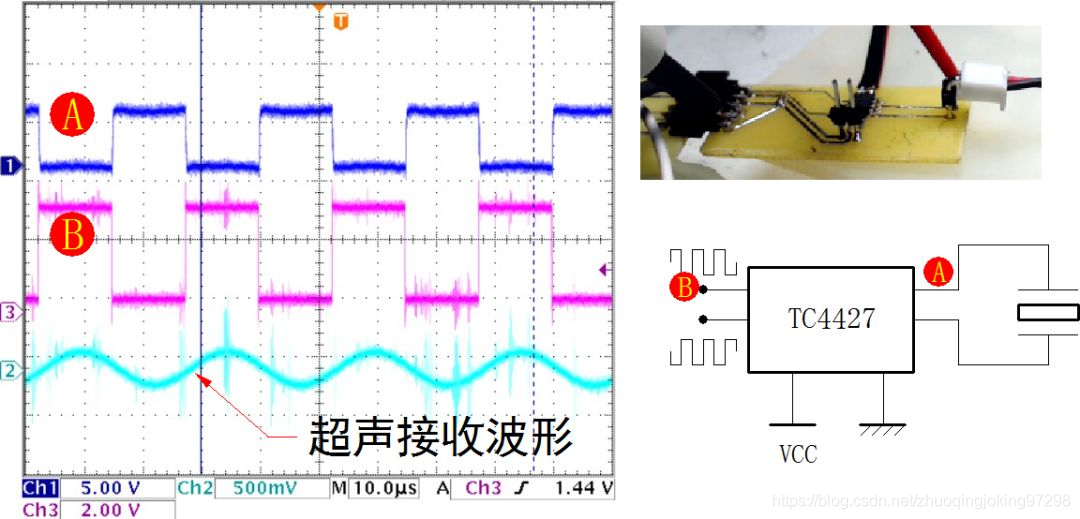
下面这个电路是采用了MOS管专用驱动芯片TC4427,它本身可以工作在很宽的电压范围内。具有很强的电容驱动能力。使用这个芯片主要是为了能够研究超声波探头发出信号与驱动电压之间的关系。
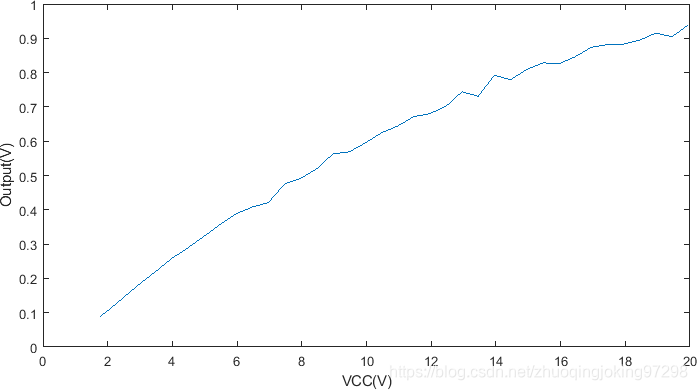
通过改变TC4427工作电压,可以获得输出不同幅值的驱动信号。下图所展示的是输出超声波探头在不同驱动电压信号下,接受探头输出信号的幅值。可以看出,随着驱动信号的增加,发射信号的强度也随之增加。但是随着驱动信号超过了12V之后,发射信号的强度也逐步趋向饱和。因此发射信号的幅值可以选择在12V至20V之间的范围呢。
超声波在传播过程中,会受到空气的影响。特别是声音在空气中传播速度会与气温、气压等条件有关。下图可以看到,当在发射和接收之间使用喷火器或者烙铁对空气进行加热的时候,接收信号会出现非常大的变化。空气的温度不仅会对声音传播速度有影响,同样也会使得声音在空气中出现折射和反射。
祖婵:前面看到的都是连续超声波发送和接收的情况。为了实现导航,使得车模能够得知距离信标的位置,则需要通过脉冲超声波信号来完成。
对。通过测量发射与接收之间的时间差,再乘以空气声音传播速度,便可以获得车模与信标之间的距离。如果在车模上安装多个不同位置的接受探头,便可以获得多点与信标之间的距离,通过几何结算便可以获得信标与车模之间的具体方位了。
最简单的就是按照两个相距一定距离的接受探头,测量两个探头距离信标的距离。然后再根据超声波的指向便可以唯一确定信标距离车模的方向和距离了。
下面的一组实验展示了在试验台上相距56厘米的发送和接收探头之间的信号传递特性。
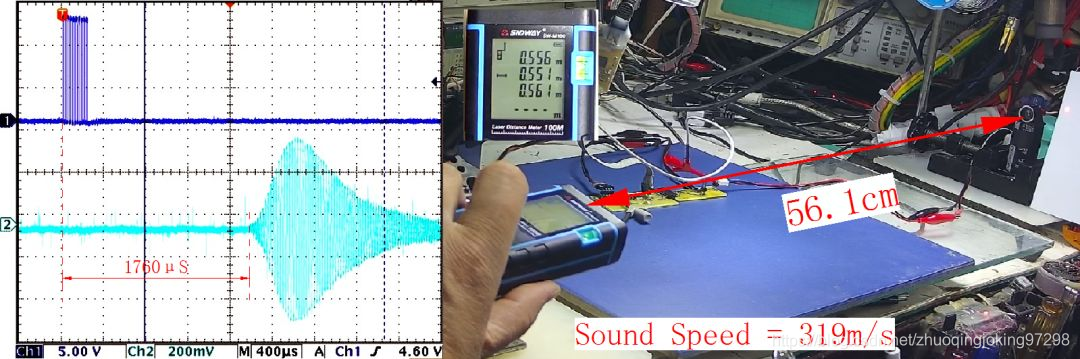
可以通过示波器测量发送信号与接收信号之间的延迟大约为1760微妙。如果使用距离除以时间差,可以得到当时条件下,声音传播速度为319米/秒。
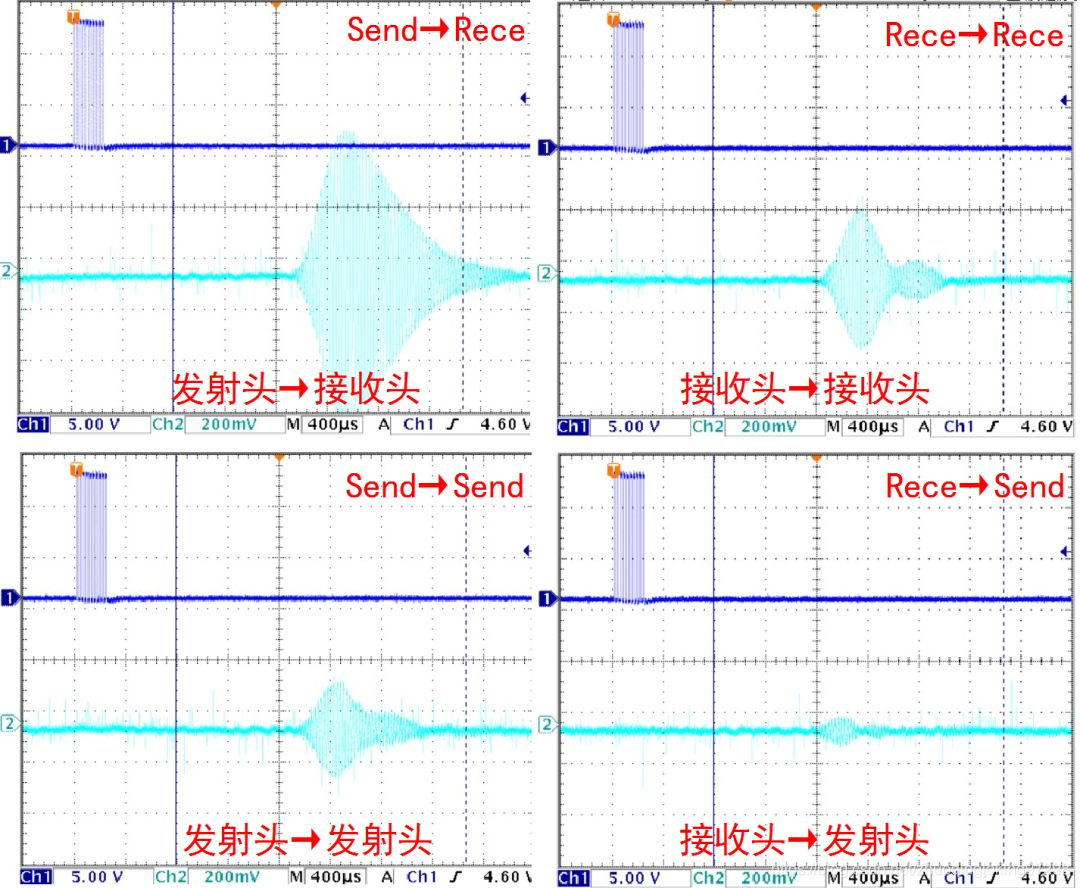
发射和接收探头外观上基本相似。下面波形显示了发射和接收探头在信号发送与接收的四种不同的组合,可以看出,不同的组合都能够完成超声信号的发送与接收。但只有使用发送探头发送信号,接收探头接收的情况下,接收到的信号强度最大。
祖婵:用于测距的超声脉冲应该多宽才好呢?
下面测量了发送40kHz超声脉冲,从1个脉冲增加到50个脉冲,接收信号的变化情况。能够看到接收信号的幅度随着发送脉冲宽度的增加而加大。当脉冲个数超过了30之后,接收信号的幅度增加就趋向于饱和。如果再增加信号,只是增加了接收信号的宽度,但幅值并没有增加多少。
由于接收信号的宽度对于测量时间差并没有多大的贡献。信号的幅值才是判断信号达到的关键。信号宽度增加也同样会带来一个问题,那就是增加测量死区和测量重复率下降。
综上所述,选择超声波脉冲宽度在20~30之间为好。
祖婵:检测电路需要对超声波探头输出信号做哪些处理呢?
随着不同的距离和方向,超声波接收传感器输出的信号的幅度从几十毫伏变化到几千毫伏。实际上,这个信号幅值也巧好在单片机AD输入范围之内。所以只要将该信号叠加上一个直流信号便可以送入单片机AD输入口即可。
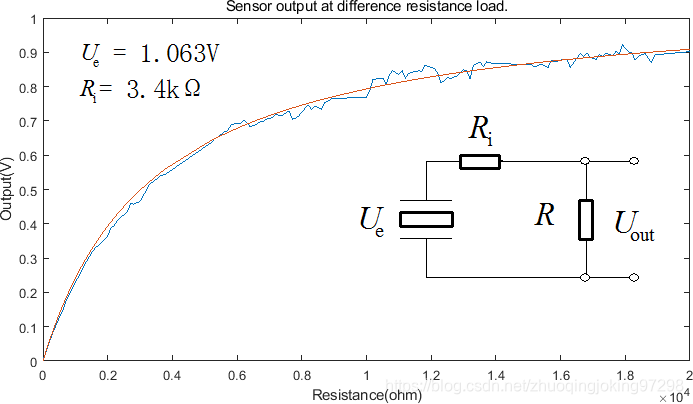
前面通过网络阻抗分析仪测量得到对应接收头谐振点(38kHz)它的输出阻抗大约为几百欧姆。但是在40kHz下,对应的阻抗就会增加,大约为几k欧姆,这使得传感器在接入带有一定阻抗负载的电路时输出信号幅度会降低。
上面的波形显示,随着负载阻抗增加,传感器输出信号的幅度也会相应增加,下图曲线反映了不同外部分在下,传感器输出电压变化情况。根据这个曲线使用最小二乘法可以估计出传感器等效的输出内阻为3.4k欧姆。这个阻抗并不大,可以直接驱动AD采用输入电路的。
也可以由外部电路对接收信号进行放大整形,获得接收信号的脉冲,输入单片机的中断口,这样可以获得信号的到达时刻。
祖婵:如果使用单片机采集接收到的信号,按照采样定理,至少需要按照信号最高频率的两倍进行采样。为了可靠分析,工程上往往采用5~10倍的采样率。对于超声波信号,如果按照5倍采样,则需要2MHz的采样,这对于普通的单片机,是无法实现的。究竟如何采样信号呢?
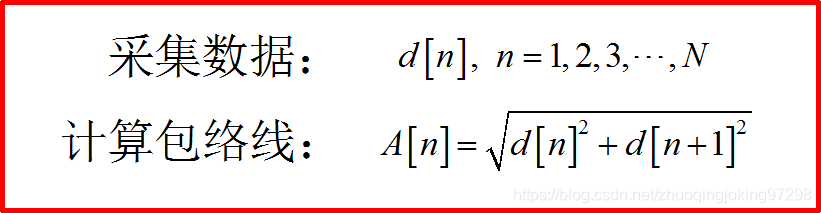
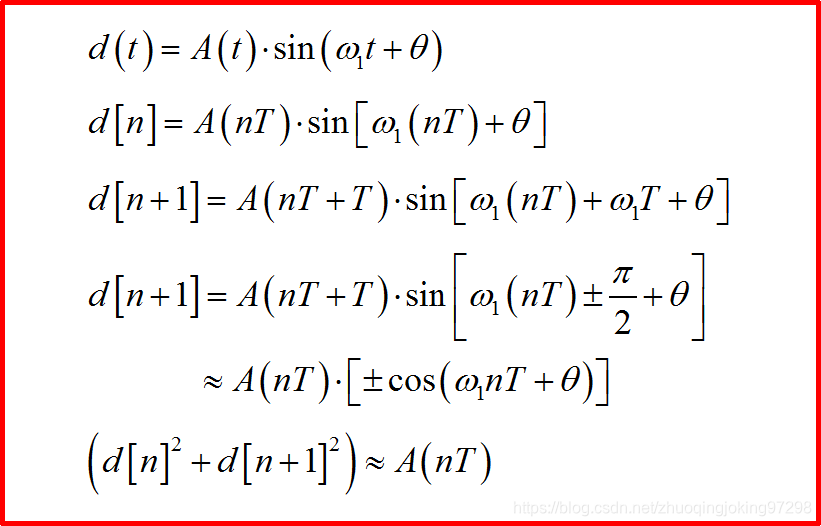
实际上,为了判断信号到达时刻,我们感兴趣的是信号的包络线。至于振荡信号本身只是为了能够便于信号通过超声波探头发送和接收而已。为了便于计算获得信号的幅度,可以采用两种采样频率:一种是160kHz, 一种是53.33kHz。这两种采样频率对应的周期分别是40kHz信号的1/4,与3/4。因此,相邻两点数据在相位上相差pi/4, 或者3pi/4。这样便可以利用相邻两项直接计算出信号包络线的幅值。计算的方法如下:
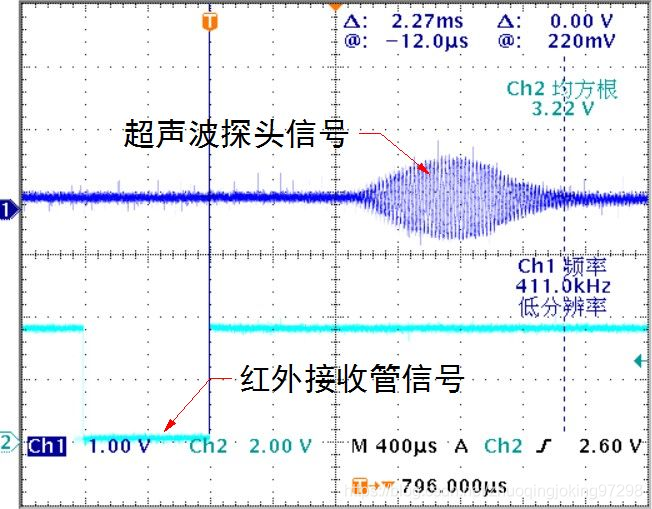
在实际比赛中,信标会同时发送红外和超声信号。采用红外接受传感器(HS0038)便可以得到超声信号发送的起始时刻。具体的信号波形如下图所示:
采用超声波周期的1/4,或者3/4进行信号采集,得到的信号波形以及计算出的包络线波形如下图所示。
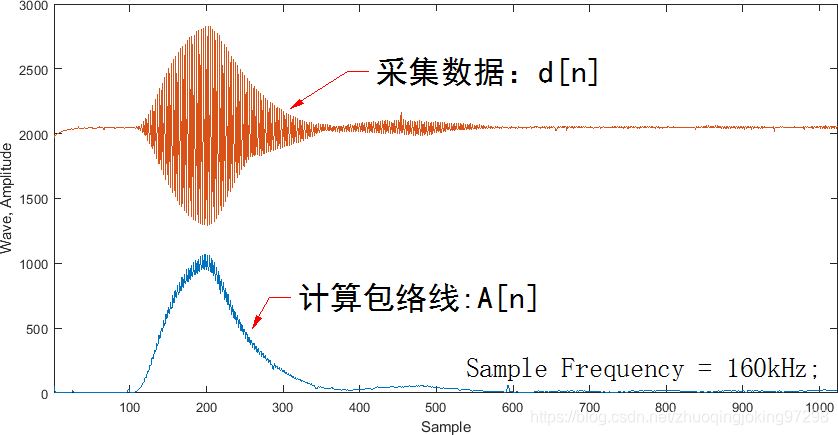
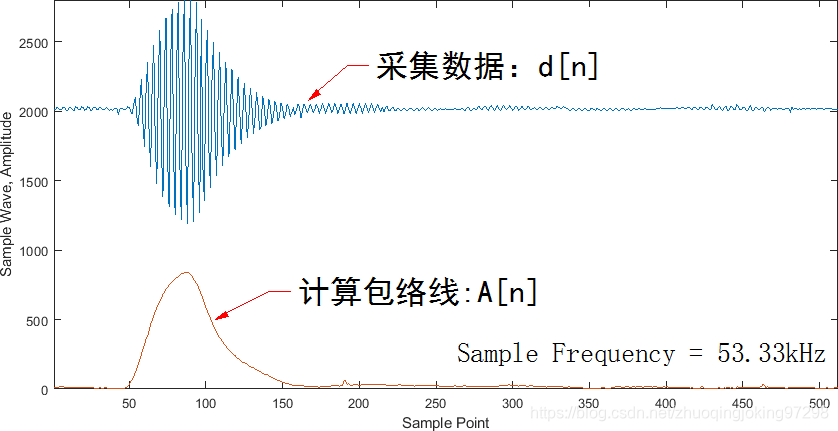
计算公式的合理性是在于,当采样周期等于载波周期的1/4,3/4时,相邻两个采样点对应的载波信号恰好相差90°。假设包络线信号变化缓慢,因此,相邻两点的均方根便是包括线的幅值。
有了接收信号的包络线,剩下的便可以通过计算信号的一阶矩,或者进行波形参数估计,便可以精确获得信号的到达时间了。如果处理器速度比较快,采用信号相关算法也可以比较方便得到信号达到时刻。
通过超声波导航,比赛现场就可以允许阳光出现了,参赛队伍车模便可以有更强的适应环境的能力。
祖禅:队长,我突然想起一个严重的问题:既然现场信标中使用了超声波,那么车模为了躲避信标,就不能够使用超声波传感器了。那该怎么办呢?
当然,如果直接使用普通的超声波测距传感器,就会受到信标发出的超声导航信号的干扰。一方面,可以利用摄像头传感器进行障碍物的检测。另一方面,也可以采用不同频率点的超声波测距,比如在50kHz, 75kHz超声波日干起。此外,采用一些特殊的信号措施,也是可以避免这方面的干扰的。相关的算法我们下一次再进行讨论。
文章来源: zhuoqing.blog.csdn.net,作者:卓晴,版权归原作者所有,如需转载,请联系作者。
原文链接:zhuoqing.blog.csdn.net/article/details/104120732

- 点赞
- 收藏
- 关注作者
评论(0)