对于来自范兵提供光电检测带模块解析


▌01 光电检测带
1.计时光电检测板
今天收到来自于 逐飞 发送过来的基于光电检测的车模通过检测传感器。这个传感器应用在 2020年第九届四川省大学生智能汽车竞赛 中,很好的服务于比赛现场的队伍。
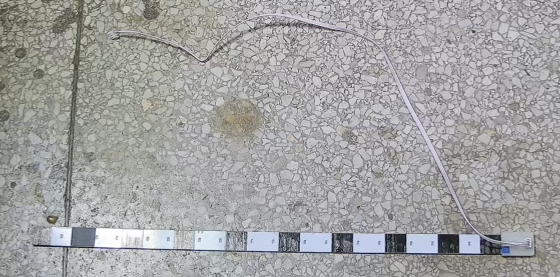
▲ 来自于逐飞光电检测带
计时所使用光电触发板,解决了部分小车在启动时速度太慢触发不了之前的那种线圈,通过省赛的检验,没有一次漏检,有一次误检(是因为发车手不小心触碰到了触发板),提高了系统的准确性和稳定性,同时安装也更方便,不会像线圈那样让赛道有个凸起,直接嵌入到两截赛道的接头处,完美的和赛道融合在一起,同时通过丝印层的巧妙设计将触发板和起跑线黑白间隔实现在触发板上,和起跑线也融为一体,完美替换原来的线圈。

▲ 将感光带铺设在斑马带中间

▲ 节能组的比赛现场
2.光电板结构
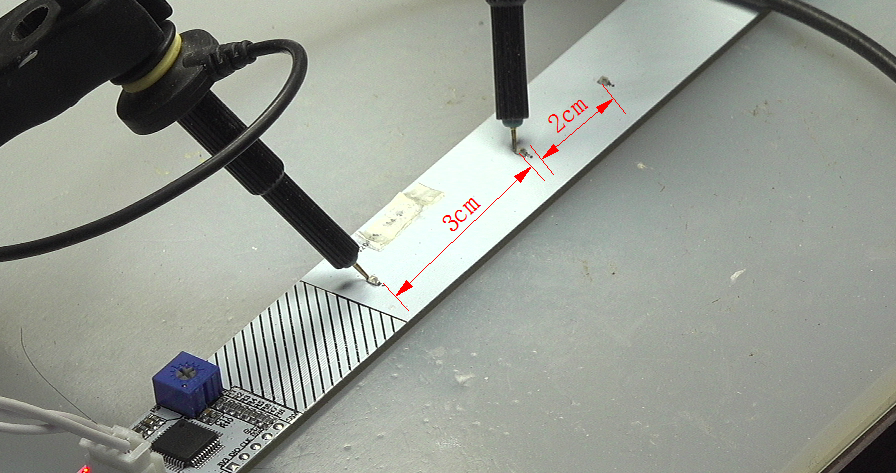
(1)光电板尺寸
- 光电板尺寸:
- 宽度: 19mm
长度: 总长48cm,有效测量长度(斑马线长度)45厘米;
(2)检测光敏管
- 光电管总数: 16个。相邻两个光电管间距分别为2厘米,和3厘米。
(3)电路接口
检测板的控制电路位于光电板一段,在白色塑料壳外部显露出两个器件:
- 接口插座: PIN3
- 单圈可调电位器:用于调整光电板的检测阈值。
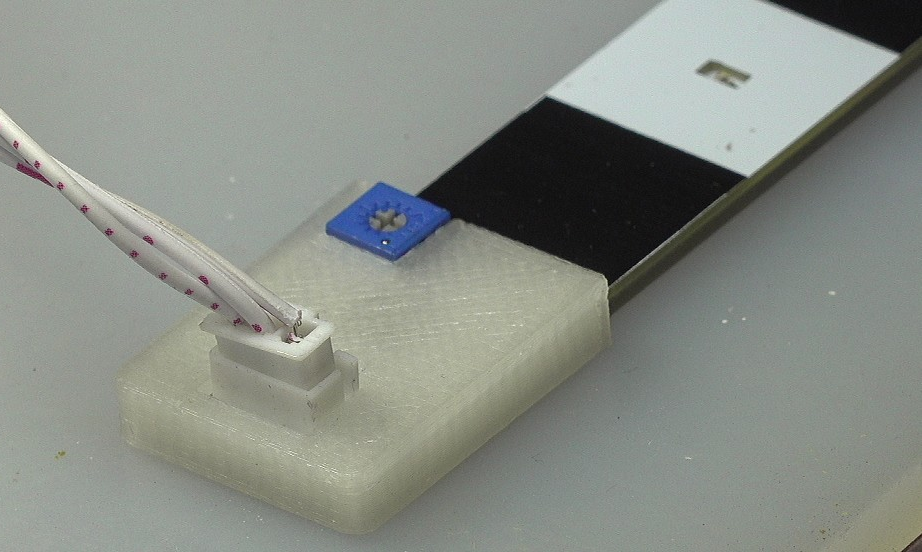
▲ 光电检测版接口
打开外壳,可以看到内部的电路结构。包括有单片机,可调电位器,程序下载端口等。
单片机为兆易的ARM3芯片 GD32F130C8T6 。 电位器的滑动端连接单片机的Pin17(PA7)。
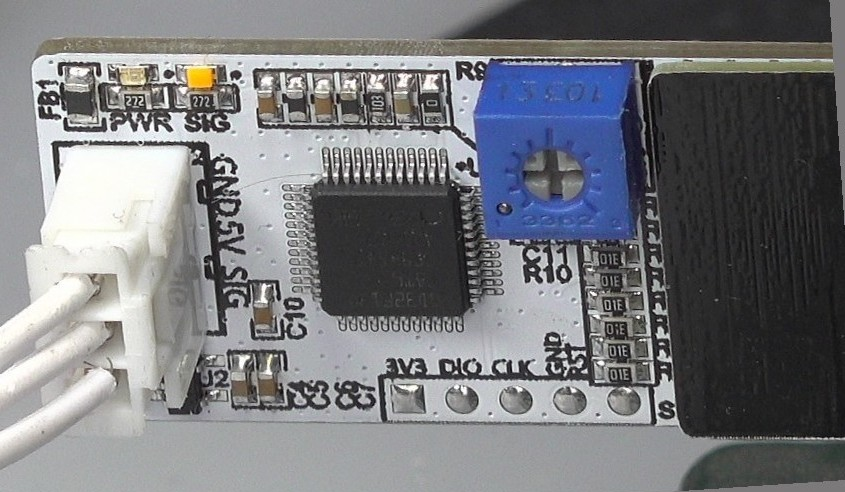
▲ 打开外壳之后看到内部结构
三芯对外接口的功能定义为:
【表1-2-3 接口功能定义】
| PIN1 | PIN2 | PIN3 |
|---|---|---|
| GND | 5V | SIGOUT |
▌02 光电检测带测试
1.通电静态测试
根据接口定义,对光电检测板施加+5V工作电压。板上红灯指示灯点亮。测量电路板静态工作参数:
- 静态工作参数:
-
功耗:23mA
信号输出电压:3.31V
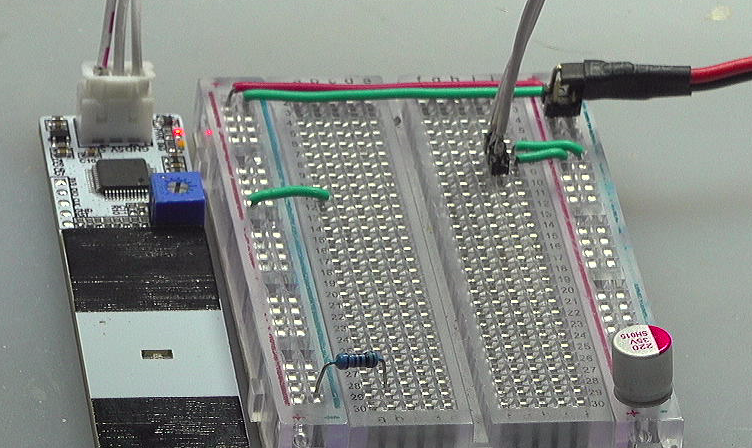
▲ 对光电检测版加+5V电源以及测试面包板
2.调节检测阈值
使用改锥改变测试板上的滑动电位器,调节检测阈值。
- 顺时针旋转:提高检测的灵敏度。旋转到底,则出现检测过于灵敏;
- 逆时针旋转,降低检测灵敏度。
调节电位器使得板上 黄色LED指示灯处在点亮与熄灭的临近值。
▲ 使用改锥调节电位器改变检测阈值
3.触发检测板
使用手指触发检测板。只要手指位于检测板上面位置,检测板上的黄色指示灯就会点亮。对应的接口SIG信号线变成低电平。
调节电位器可以改变触发手指所处在的高度。
▲ 使用手指来触发光电检测板
经过测试,当黑色的轮胎压过检测板,即使在两个光电管之间,也能够灵敏的触发光电检测板。
对于宽的普通轮胎以及窄的直立车模轮胎都能够灵敏的给出反映。
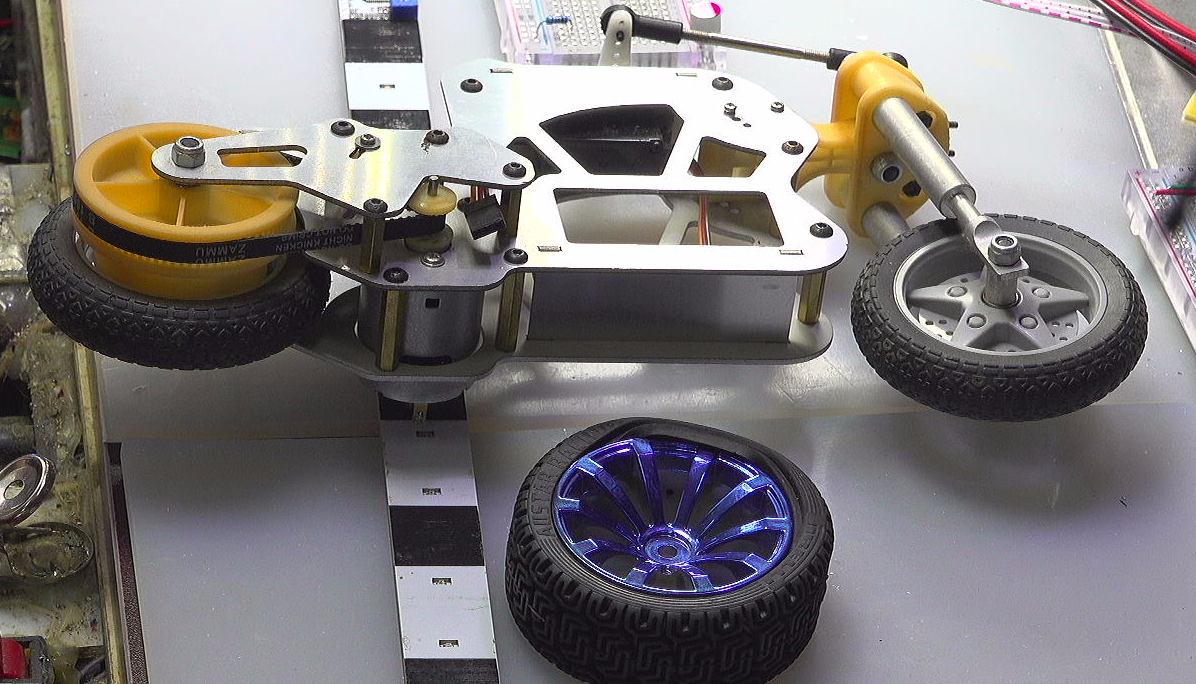
▲ 直立车轮与普通四轮轮胎
▌04 电路解析
核心信息处理电路单片机为兆易的ARM3芯片 GD32F130C8T6 ,其外围配置有光电管电路、稳压电源、指示灯以及接口电路等。
3.3V稳压电压是SOT-25封装激光码显示为:WJ-Q8R芯片。
1.光敏三极管电路
光电管电路包括16个光敏管。每两个一组,它们公用一个上拉电阻。
▲ 相邻两个LED公用一个上拉电阻
驱动它们的信号为100Hz,占空比为50%的方波,相邻两个光敏管的驱动信号为反相信号。
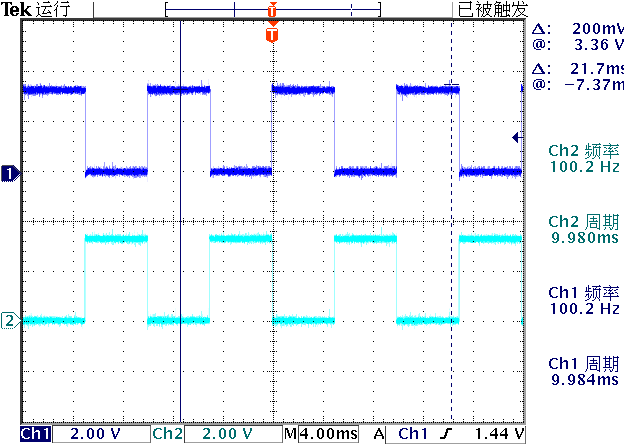
▲ 相邻两个光敏管驱动电压波形
▲ 光电管的正极随着遮挡不同对应的波形变化
使用黑色胶带将光敏管覆盖,此时测量它的正负极的信号如下:
可以看到,由于该光敏管已经不导通了,所以它对应为高阻。当他的阴极信号为高电平的时候,同组相邻的光敏管管(没有被遮挡)的负极为低电平,此时它们公用一个上拉电阻,所以信号为低信号。
当该光敏管管负极为低电平时,由于同组另外一个光敏管的负极为高。它又被遮挡,呈现高阻,所以此时对应的上拉电阻的下端为高电平。
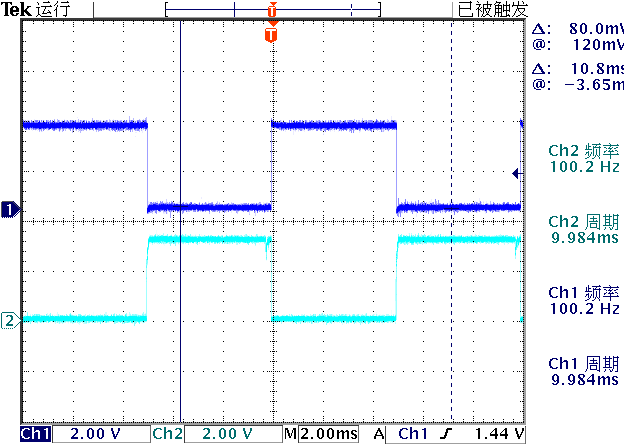
▲ 被遮挡之后的光电LED的正极(青色)与负极(蓝色)波形
如果将同组的光电二级都遮挡,此时应该对应的同组公用正端均为高电平。
通过上述分析,可以看到,它使用了八个ADC的输入端口,最终可以实现对于16路光电二级的测量。
同一组光电LED使用相同的上拉电阻(310kΩ),下图显示了他们公用的上拉电阻 。
上拉电阻分为两组,另外一端相连之后分别接入单片机的PIN33(PA12),PIN33(PA11)管脚。
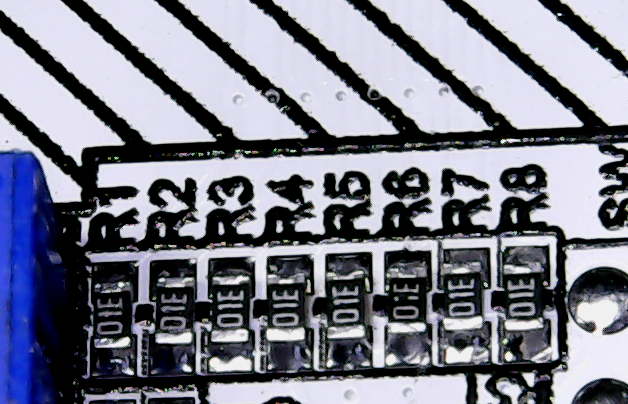
▲ 每一组对应的电阻
2.光敏三极管
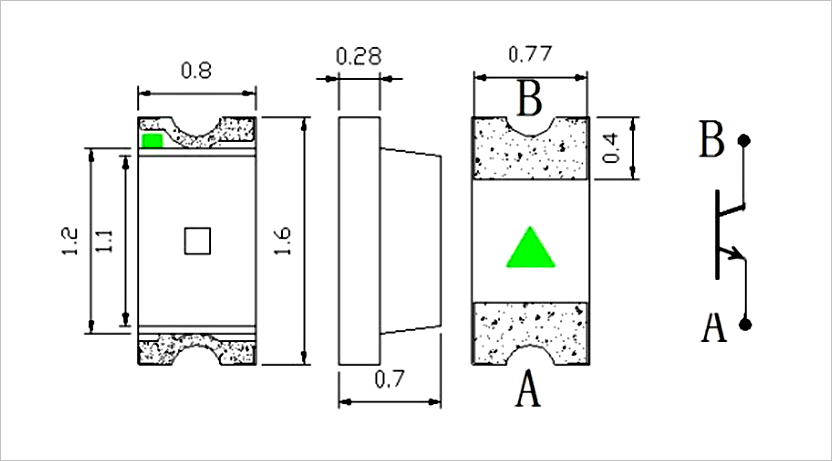
(1)外观
封装为0603 的光敏管,由于没有参数,因此不清楚是何种器件。从外观对比,类似于 PTSMD023 , PT0603 , 贴片光敏电阻 PT0603 。
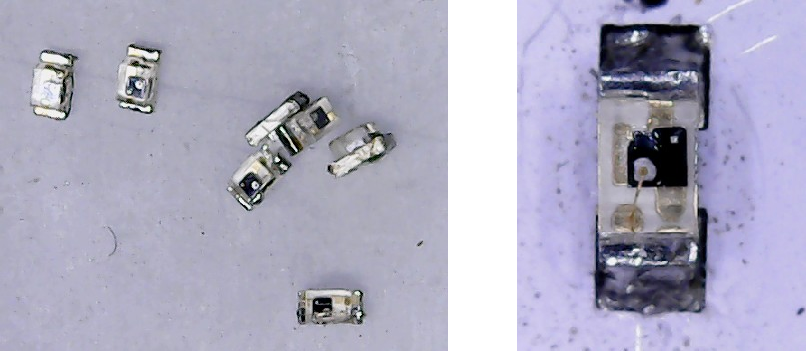
▲ 微型光敏电阻
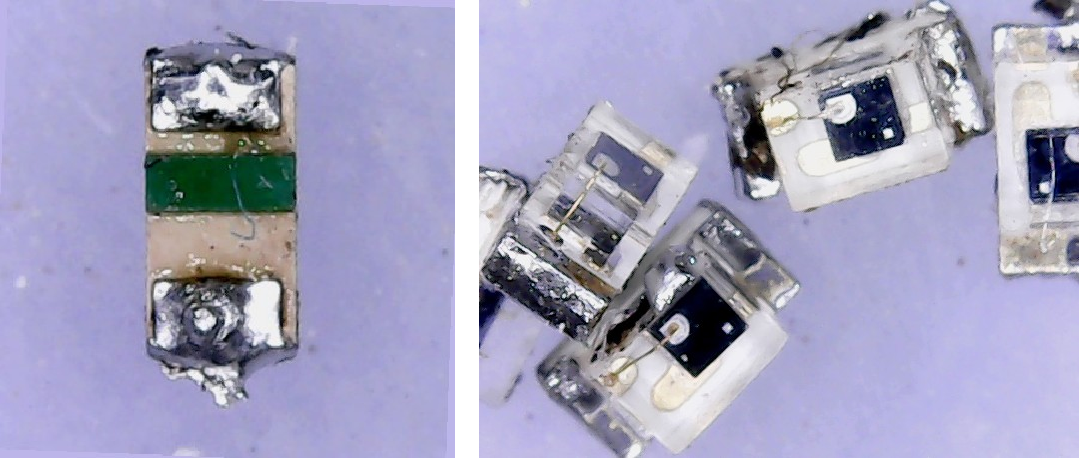
▲ 光敏三极管
(2)电气参数
将光敏管固定在100mil的2PIN的进行测试。
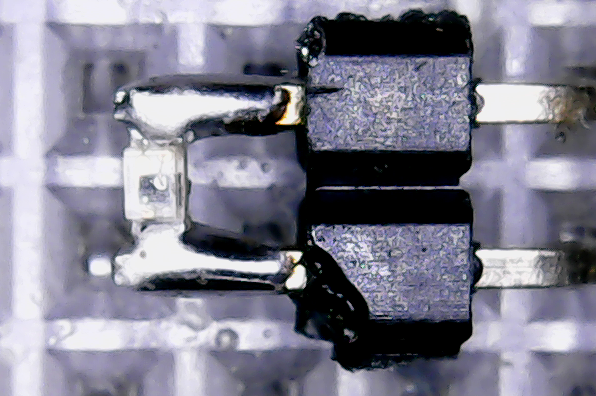
▲ 固定在两个PIN(100mil)的光敏管
使用数字万用表可以测量到光敏管的的极性(注意:是在有光的情况下)。如果没有光,光敏管本身就是截止。
【Ⅰ.在有光的情况下测量】
下面通过在光敏管上串接一个1kΩ电阻,来测量光电管流过的电流。
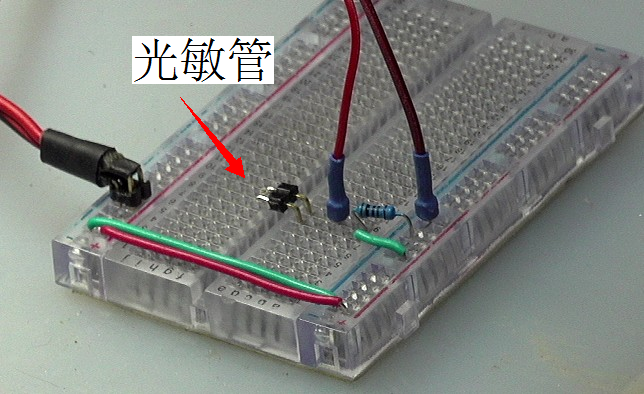
▲ 测量光敏管的正向V-I关系
下面给出了光敏管的正向电压与电流之间的关系。

▲ 正向导通电压与电流之间的关系
【Ⅱ.在无光的情况下测量】
使用黑色胶带将光敏管贴住,重新测量正向V-I关系。
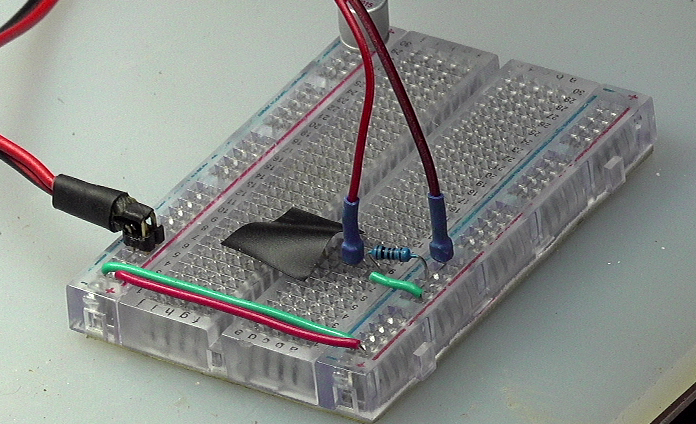
▲ 使用黑色胶带将光敏管遮住

▲ 在遮光的情况下测量光敏管的正向V-I特性
从上述测量结果来看,正向的导通特性类似于有三极管饱和特性。是光敏电阻经过三极管放大之后对应的特性。
【Ⅲ.光强与光敏管的电流】
研究光强与光敏管之间的关系。根据 LED的电流与光强之间的关系 ,LED的发光强度与流过的电流之间的关系基本上呈现线性关系。所以使用一个白色的LED发送光,利用流过的电流来表示光强,同时测量光敏管的高和电流,从而获得光敏管电流与光强之间的关系。
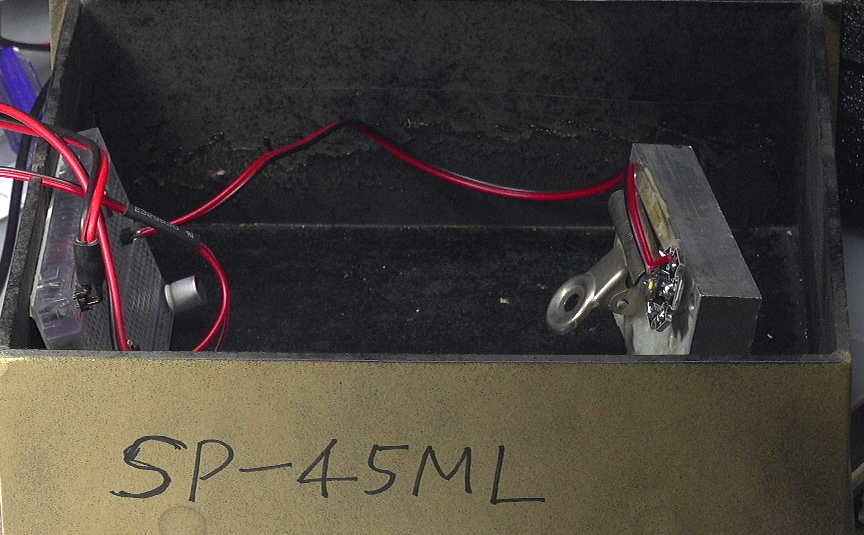
▲ 使用LED测量光敏三极管的饱和电流之间的关系
下面是测量得到的光强与光敏三极管饱和电流之间的关系。可以看到光敏管的饱和电流与光强之间基本上呈现线性关系。
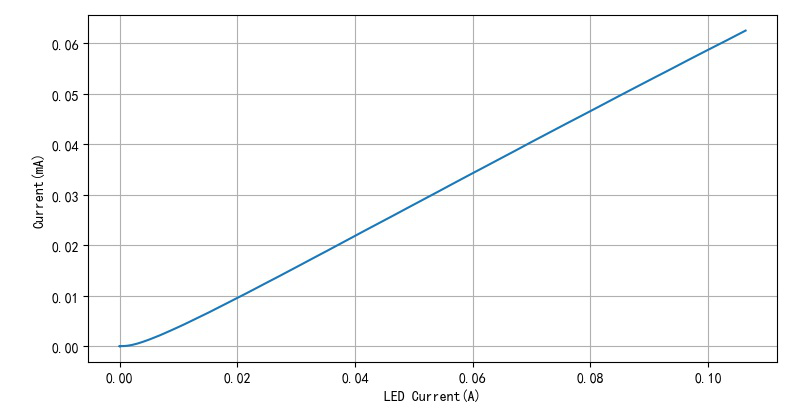
▲ 发光LED的电流与LED的饱和电流
▌测试结论
通过对于来自于范兵寄送的逐飞设计制作的光带传感器的分析,获得了初步它的检测特性。使用间距在2~3厘米的光敏三极管可以对于智能车黑色轮胎压过有很好的检测效果。甚至对于轮胎较窄的电单车也能够比较灵敏。
原电路设计功能非常丰富,也就是从功能上可以将车模经过的横向位置进行测量,能够反映出车模运行的位置。但如果仅仅测量车模通过的时间,可以将这个电路进一步简化。比如将所有的光电管进行串联,便可以只使用一路输出就可以反映是否车模通过。
■ 相关文献链接:
▌附件内容
1.测量光敏管正向V-I关系。
#!/usr/local/bin/python
# -*- coding: gbk -*-
#============================================================
# TEST1.PY -- by Dr. ZhuoQing 2021-04-18
#
# Note:
#============================================================
from headm import *
from tsmodule.tsvisa import *
vset = linspace(0, 1.2, 100)
dm3068open()
idim = []
vdim = []
for v in vset:
dh1766volt(v)
time.sleep(1)
vres = dm3068vdc()
vd = v - vres
vdim.append(vd)
idim.append(vres)
printff(v, vd, vres)
tspsave('Measure', v=vdim, c=idim)
dh1766volt(0)
plt.plot(vdim, idim)
plt.xlabel("Voltage(V)")
plt.ylabel("Current(mA)")
plt.grid(True)
plt.tight_layout()
plt.show()
#------------------------------------------------------------
# END OF FILE : TEST1.PY
#============================================================
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
文章来源: zhuoqing.blog.csdn.net,作者:卓晴,版权归原作者所有,如需转载,请联系作者。
原文链接:zhuoqing.blog.csdn.net/article/details/115751063

- 点赞
- 收藏
- 关注作者
评论(0)