AI视觉组基于ESP32的裁判系统第一版本设计要求


简 介: 面对第十六届全国大学生智能车竞赛中新增加的一些组别的要求,比如室内AI组,对于车模任务增加的检测任务,设计了基于ESP32为核心的比赛系统。本文给出了对于比赛系统功能的要求。
关键词: 比赛系统,ESP32,室内AI,智能车竞赛
▌01 AI室内视觉组裁判系统要求
1.裁判系统要求
在 全国大学生智能车竞赛 中的 室内AI视觉组 要求参赛车模根据识别路边场景完成相应的动作:
- 对于动物图片要求在规定区域停止3秒钟;
- 对于水果图片要求使用车载激光器投射光斑;
- 对于三岔路口的数字要求选择左行和右行;
(1)裁判系统功能
因此对于裁判系统需要能够完成以下判断功能:
- 判断车模在某一区域是否能够停留三秒钟;
- 判断车模在通过三岔路口是否首次按照规定路口行进;
- 判断车模是否将激光盘点投射在图片中心;
- 车模运行时间计时功能;
由于比赛中检测点比较多,至少包括有一个三岔路口、一个动物图片、一个水果图片。在决赛的时候有可能还会增加到 4~ 5个检测点。因此要求设计的检测点能够离散分布设置,并通过现场WiFi网络连接在一起进行统一的设置与读取信息。

▲ 逐飞科技给出的裁判系统的演示
(2)裁判系统功能指标
【Ⅰ.车模运行时间功能】
对于车模形式出车库与返回车库之间的时间差进行计时。
- 指标要求:
-
计时精度为1ms;
接口形式:USB,WiFi,UART(可选)
通讯协议: 能够与以往智能车竞赛比赛系统软件兼容
它能够通过WiFi与其它各个模块相连,也可以单独作为计时器系统应用于其它各赛题组。
【Ⅱ.检测激光光斑功能】
检测经过125Hz调试的激光光斑信号。
- 指标要求:
-
灵敏度:5mW红色激光,光斑直径在5厘米左右
响应时间:小于500ms
检测点:5个,分为两组;一组为一个监测点,位于靶心检;另外一组包括四个检测点,位于目标四周检;
相应形式:红色LED(直径大于10mm)、绿色LED(直径大于10mm)、蜂鸣器;
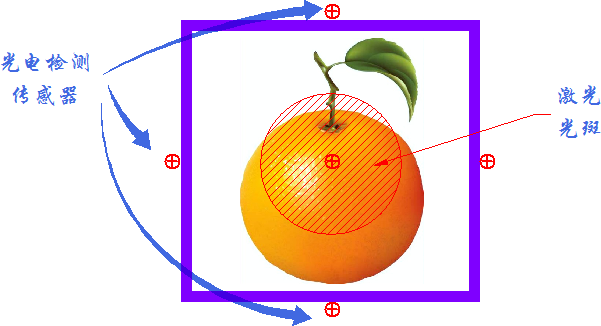
▲ 光电检测传感器的位置分布
功能描述:
- 对于水果目标靶,如果靶心检测点检测到信号,而四周检测点没有检测到信号,则表示激光发送成功;如果任何一个四周检测点检测到激光信号,都表示激光发送失败;
- 对于动物目标靶,任何一个检测点检测到激光信号,都表示激光投射失败;
- 检测到激光发送成功时,绿色LED点亮,同时蜂鸣器鸣叫,五秒钟后停止; 检测到激光发送失败时,红色LED闪烁,频率10Hz,占空比50%,持续时间五秒钟,同期蜂鸣器也做相同的断续鸣叫。
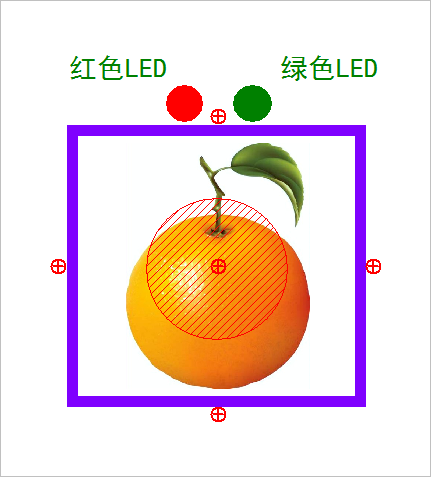
▲ 目标靶位上的响应LED
【Ⅲ.判断停留时间功能】
检测车模进入AprilTag前后各50厘米的范围内,车模停留的时间。只是对于动物标靶旁边的范围,检查车模是否停留超过3秒钟。
- 检测指标:
-
检测范围:1米
时间定时精度:1ms
指示方式:LED和蜂鸣器
如果车模停留时间少于3秒钟,则红色LED闪烁,频率10Hz,占空比50%,持续时间五秒钟,同期蜂鸣器也做相同的断续鸣叫。
如果车模在停留区的时间超过3秒钟,则绿色LED点亮,同时蜂鸣器鸣叫,五秒钟后停止。
【Ⅳ.检测三岔路口功能】
检测车模在通过三岔路口时,是否安装正确的路径行进。
- 检测指标:
-
在三岔路口两个出口处设置车辆通过检感应线;
对于前后两次通过能够自动进行切换,了就是第一次走一边,第二次行走另外一边;
对于判断结果成功与识别的知识与前面【判断停留时间功能】相同。
【Ⅴ.各检测点联网功能】
由于比赛中可能同时具有多个检测模块,所以要求这些模块能够通过局部WiFi链接在一起,由控制软件同一控制。
为了防止局域网中断或者不具备,各个模块也可以单独进行设置工作。
【Ⅵ.其他基本功能】
- 控制模块采用相同的主板,通过其中的拨码开关来设置具体的功能(计时、三岔路口、停留时间、激光光板检测);
- 模块可以通过3.7 ~4.8V de 充电电池供电。整体功率消耗小于20mA。在2AH的蓄电池供电下可以持续工作100小时;
- 模块也可以通过5V直流电源提供电源;
2.前期验证实验
(1)信号检测试验
1. 在 推文 傅里叶帮我看看,谁在照射我? 描述了检测投射在水果图片上激光信号的检测方案。给出了激光投射器的调制频率的要求;并对基于 微型光电二极管(SP-1CL3) 检测调制激光信号的方法进行验证。
2. 在 ESP32检测调制激光信号程序优化 ;测试ESP32S基本模块的功能,并验证是否可以应用在AI智能车竞赛检测激光信号中 验证并优化了基于ESP32对信号采集与检测的验证;
3. 在 基于ESP32模块利用检测线圈检测车模停止时间,室内视觉AI裁判系统 验证了通过简单的感应线圈来判断车模通过时间的方案。
因此,基于以上实验,下面的设计便是基于ESP32模块的设计方案。由于该模块比较便宜(单个模块大约为¥10元),集成有WiFI,蓝牙通信功能。提供了丰富的外部模块,AD(六个通道),DA,SPI,I2C,UART等等。
(2)逐飞科技验证实验
逐飞科技给出可对于AI视觉裁判系统的验证演示结果。在实际识别图片中心和四周布置光电检测之后,来识别调制(125Hz)激光信号的功能。验证了对于激光调制信号检测方案的灵敏性和快速响应特性。

▲ 逐飞科技给出的AI检测系统测试结果
▌02 设计参考方案
1.系统设计组成
为了便于部署安装,AI检测系统包括三部分:
- 控制主板: 包括了ESP32,激光检测放大电路,感应线圈放大电路,3.3V稳压源等
- LED,蜂鸣器小板: 包括有红色LED(D:10mm),绿色LED(D:10mm),蜂鸣器以及它们相应的驱动电路;通过6PIN接口与主板相连。
- 电源: 包括5V电源,或者相关4.8V充电电池与充电器等;
2.电路主控板1
(1)电路原理图
下面给出了基于ESP32的检测系统主控板设计。
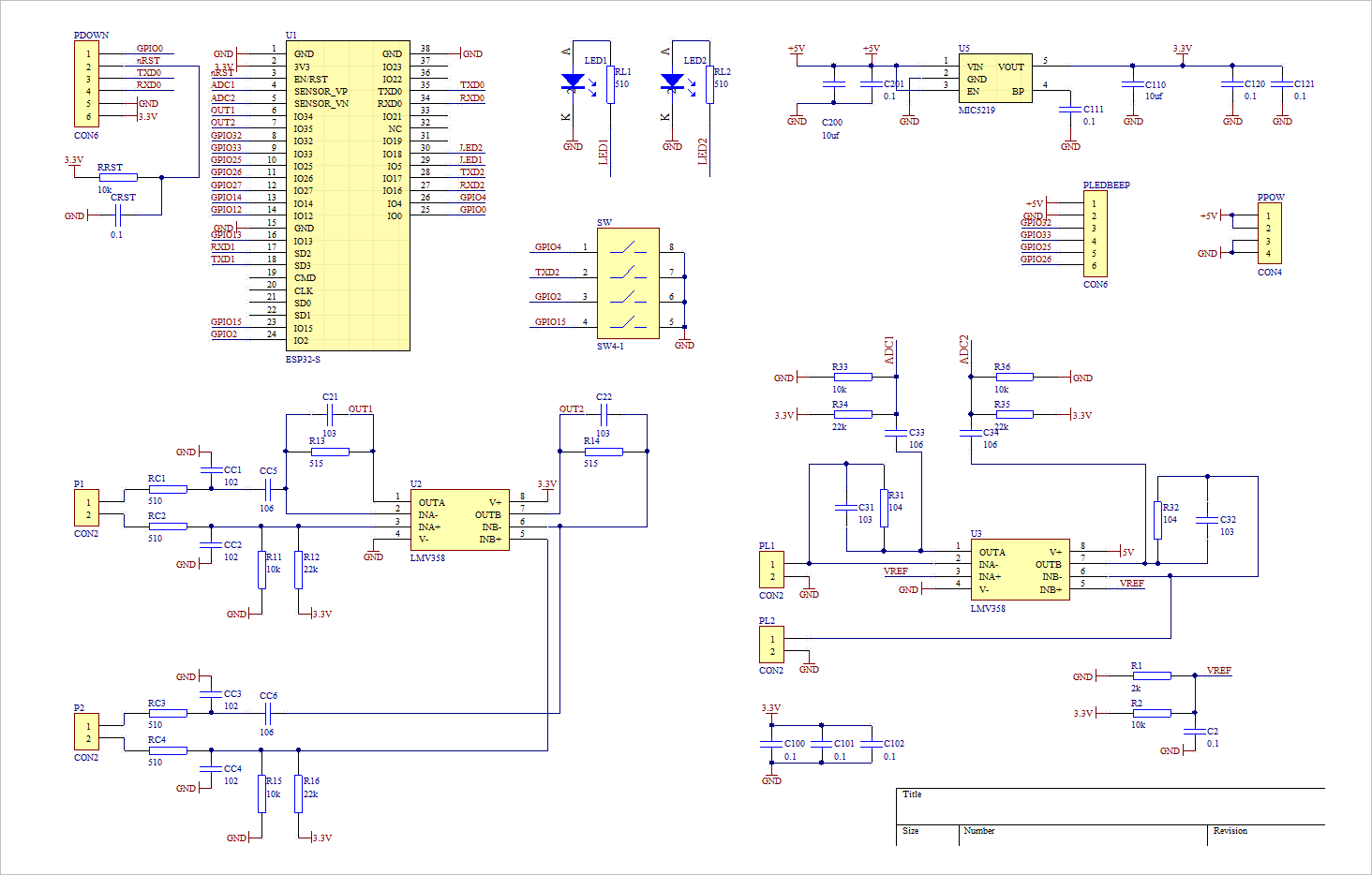
▲ 电路原理图整体设计
可以在上述原理图上,增加CH340G(或者CH340E)与UART2相连,这样主板就可以具有WiFi,USB端口与裁判系统计算机相连了。
(2)感应线圈放大电路
由U2组成了两路感应线圈放大电路。对于来自于感应线圈的电磁信号进行放大滤波之后再由ESP32进行采集、数字滤波、判断处理。具有两个独立的线圈输入端口P1,P2。
两路线圈可以应用在:
- 判断区域停留时间,将两个线圈部署在相距1米的距离处;
- 判断三岔路通过顺序,将两个线圈部署在三岔路口两个串口处;

▲ 感应线圈
- 线圈基本参数:
-
串联电阻:18.85Ω
电感:1.778mH
(3)光电信号放大电路
由U3组成光电信号放大电路。用于激光检测的光电传感器使用 微型光电二极管(SP-1CL3) 。
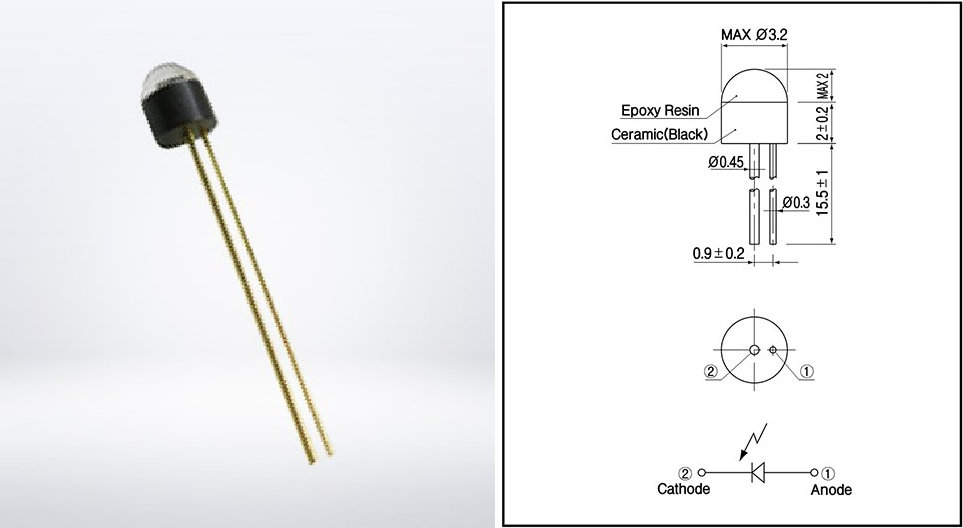
▲ SP-1CL3 外形与尺寸
光电二极管分为两组:
- 中心靶位:由一个SP-1CL3光电二极管组成,部署在目标靶位的中心位置;
- 四周靶位:由四个SP-1CL3并联组成,部署在目标靶位四个边的中心位置;
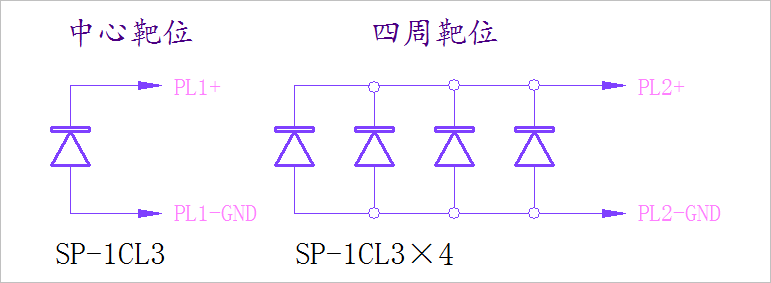
▲ 两组光电二极管
(4)基于黄色LED的检测带
这部分内容主要是为了能够将来替代【2】中的感应线圈,而使用黄色LED制作的光电检测板。在 基于黄色LED反向电流的光电检测板 给出了对于这种检测方式的测试的结果。
3.指示灯小板
LED,蜂鸣器小板是用来承载指示两个指示LED和蜂鸣器的小板。将来它固定在目标板的上方。
在小板上包括有驱动LED,蜂鸣器的 UNL2003(达林顿管阵列),6PIN的接口以及LED, 蜂鸣器焊盘等。
▲ LED,蜂鸣器小板
4.快速制版测试电路板

▲ 快速制版实验电路PCB设计
▌设计总结
本文给出了用于AI视觉组的裁判系统设计要求和参考方案。它除了具备有传统的计时功能之外,还可以对于车模停留时间,激光信号检测,三岔路口通过顺序等进行判断。
AI视觉组标靶检测方案测试演示
基于ESP32的设计,使得其可以在未来比赛中直接将比赛成绩信息上传到云端,完成原始信息的获取。基于WiFi还可以将现场的多个检测点(3~5)相互连接在一起形成统一的开启和设置。
■ 相关文献链接:
- 第十六届全国大学智能汽车竞赛竞速比赛规则
- 第十六届全国大学生智能车竞赛竞速组-室内视觉组补充说明
- 傅里叶帮我看看,谁在照射我?
- 微型光电二极管(SP-1CL3)
- ESP32检测调制激光信号程序优化
- 测试ESP32S基本模块的功能,并验证是否可以应用在AI智能车竞赛检测激光信号中
- 基于ESP32模块利用检测线圈检测车模停止时间,室内视觉AI裁判系统
- 基于黄色LED反向电流的光电检测板
● 相关图表链接:
- 逐飞科技给出的裁判系统的演示
- 光电检测传感器的位置分布
- 目标靶位上的响应LED
- 逐飞科技给出的AI检测系统测试结果
- 电路原理图整体设计
- 感应线圈
- SP-1CL3 外形与尺寸
- 两组光电二极管
- LED,蜂鸣器小板
- 快速制版实验电路PCB设计
设计参考方案AD工程文件:AD\SmartCar\2021\LaserDetect\AILasserDetectrESP32.PcbDoc ↩︎
文章来源: zhuoqing.blog.csdn.net,作者:卓晴,版权归原作者所有,如需转载,请联系作者。
原文链接:zhuoqing.blog.csdn.net/article/details/115719745

- 点赞
- 收藏
- 关注作者
评论(0)