产生螺旋分类样本集合 SpiralData

【摘要】
➤01 产生螺旋数据
螺旋分类集合是用来测试分类器的典型试金石。在 N-arms Spiral Data 给出了产生螺旋数据集合的PYTHON程序。
arg: 100 --arm...
➤01 产生螺旋数据
螺旋分类集合是用来测试分类器的典型试金石。在 N-arms Spiral Data 给出了产生螺旋数据集合的PYTHON程序。
-
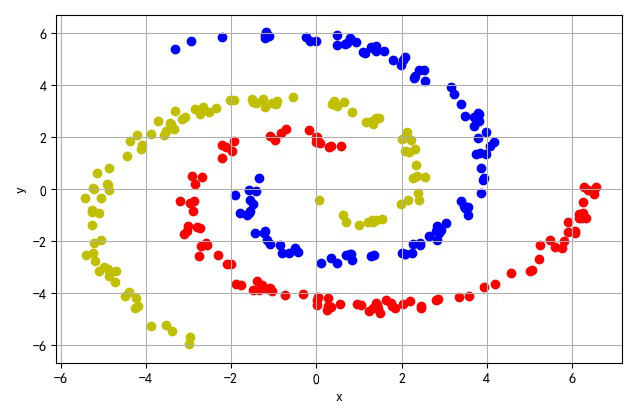
arg: 100 --arms 3

▲ 三条洛讯数据集合 -
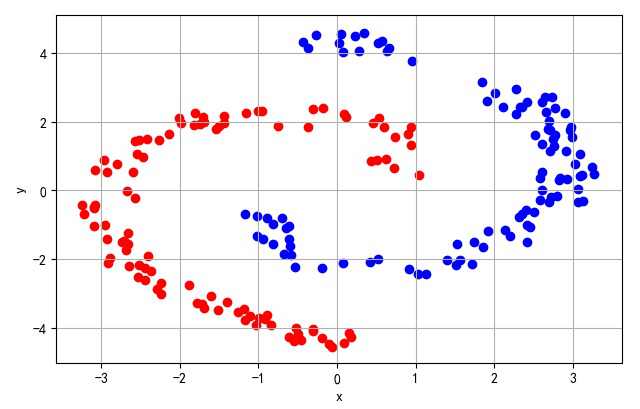
arg: 200 --arms 2
▲ 两条螺旋线数据集合 -
arg: 100 --arms 2 --end 270
▲ 两条螺旋线数据集合

➤02 PYTHON程序
#!/usr/local/bin/python
# -*- coding: gbk -*-
#============================================================
# SPIRALDATA.PY -- by Dr. ZhuoQing 2020-11-23
#
# Note:
#============================================================
from headm import *
import argparse
import math
import numpy as np
def rotate_point(point, angle):
"""Rotate two point by an angle.
Parameters
----------
point: 2d numpy array
The coordinate to rotate.
angle: float
The angle of rotation of the point, in degrees.
Returns
-------
2d numpy array
Rotated point.
"""
rotation_matrix = np.array([[np.cos(angle), -np.sin(angle)], [np.sin(angle), np.cos(angle)]])
rotated_point = rotation_matrix.dot(point)
return rotated_point
def generate_spiral(samples, start, end, angle, noise):
"""Generate a spiral of points.
Given a starting end, an end angle and a noise factor, generate a spiral of points along
an arc.
Parameters
----------
samples: int
Number of points to generate.
start: float
The starting angle of the spiral in degrees.
end: float
The end angle at which to rotate the points, in degrees.
angle: float
Angle of rotation in degrees.
noise: float
The noisyness of the points inside the spirals. Needs to be less than 1.
"""
# Generate points from the square root of random data inside an uniform distribution on [0, 1).
points = math.radians(start) + np.sqrt(np.random.rand(samples, 1)) * math.radians(end)
# Apply a rotation to the points.
rotated_x_axis = np.cos(points) * points + np.random.rand(samples, 1) * noise
rotated_y_axis = np.sin(points) * points + np.random.rand(samples, 1) * noise
# Stack the vectors inside a samples x 2 matrix.
rotated_points = np.column_stack((rotated_x_axis, rotated_y_axis))
return np.apply_along_axis(rotate_point, 1, rotated_points, math.radians(angle))
def main():
parser = argparse.ArgumentParser(description='Generate n-arm spiral')
parser.add_argument('count', type=int, help='Number of samples to generate per arm', default=2)
parser.add_argument('--arms', type=int, help='Number of args to generate', default=2)
parser.add_argument('--angle', type=float, help='Angle between each arm.', default=180)
parser.add_argument('--auto-angle', type=bool, default=True,
help='Automatically choose the angle for the arms')
parser.add_argument('--start', type=float, help='Start angle of the arms', default=0)
parser.add_argument('--end', type=float, default=360,
help='End angle of the arms. A value of 360 corresponds \
to a full circle.')
parser.add_argument('--noise', type=float, help='Noise for the arms', default=0.5)
parser.add_argument('--filename', type=str, help='Name of the file to save the dataset',
default='n_arm_spiral')
args = parser.parse_args()
# Create a list of the angles at which to rotate the arms.
# Either we find the angles automatically by dividing by the number of arms
# Or we just use the angle given by the user.
classes = np.empty((0, 3))
angles = [((360 / args.arms) if args.auto_angle else args.angle) * i for i in range(args.arms)]
for i, angle in enumerate(angles):
points = generate_spiral(args.count, args.start, args.end, angle, args.noise)
classified_points = np.hstack((points, np.full((args.count, 1), i)))
classes = np.concatenate((classes, classified_points))
if i == 0: cstr = 'r'
elif i == 1: cstr = 'b'
else: cstr = 'y'
plt.scatter(points[:,0], points[:, 1], color=cstr)
printf(classes.shape)
tspsave('spiral', data=classes)
plt.xlabel("x")
plt.ylabel("y")
plt.grid(True)
plt.tight_layout()
plt.show()
# np.savetxt(args.filename + '.csv', classes, fmt=['%10.15f', '%10.15f', '%i'], delimiter=';')
if __name__ == '__main__':
main()
#------------------------------------------------------------
# END OF FILE : SPIRALDATA.PY
#============================================================
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
文章来源: zhuoqing.blog.csdn.net,作者:卓晴,版权归原作者所有,如需转载,请联系作者。
原文链接:zhuoqing.blog.csdn.net/article/details/109975990

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)