MATLAB从入门到精通:Simulink仿真必看——连续模块之PID控制器(PID Controller)

【摘要】
1.模型建立
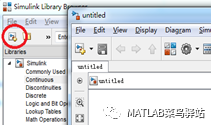
打开MATLAB2014a,如上图运行Simulink库,弹出Simulink Library Blocks,点击Continuous,在里面将会看到今天所要探究的PID Controller模块。
在Simulink Library Blocks菜单栏创建slx文件(2012版以下为mdl)。
将新...
1.模型建立

打开MATLAB2014a,如上图运行Simulink库,弹出Simulink Library Blocks,点击Continuous,在里面将会看到今天所要探究的PID Controller模块。

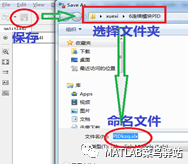
在Simulink Library Blocks菜单栏创建slx文件(2012版以下为mdl)。
将新建文件选择文件夹保存并将之命名PIDkzq。
将PID Controller加入到PIDkzq.slx。
1)如下图Add to PIDkzq载入其中。
2)鼠标左击PID Controller按住拖动到其中。

完善PID Controller系统控制模型,通过Sources→Signal Generator加入信号发生器。
文章来源: wenyusuran.blog.csdn.net,作者:文宇肃然,版权归原作者所有,如需转载,请联系作者。
原文链接:wenyusuran.blog.csdn.net/article/details/116978482

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)