数据结构和算法之图的遍历

6.2 图的遍历
6.2.1 图的遍历——DFS
遍历:把图里面每个顶点都访问一遍而且不能有重复的访问
深度优先搜索(DFS)
当访问完了一个节点所有的灯后,一定原路返回对应着堆栈的出栈入栈的一个行为
深度优先搜索的算法描述
void DFS(Vertex V)//从迷宫的节点出来
{
visited[V] = true;//给每个节点一个变量,true相当于灯亮了,false则是熄灭状态
for(V的每个邻接点W)//视野看得到的灯
if(!visited[W])//检测是否还有没点亮的
DFS(W);//递归调用
}
//类似树的先序遍历
若有N个顶点、E条边,时间复杂度是
用邻接表存储图,有O(N+E)//对每个点访问了一次,每条边也访问了一次
用邻接矩阵存储图,有O(N²)//V对应的每个邻接点W都要访问一遍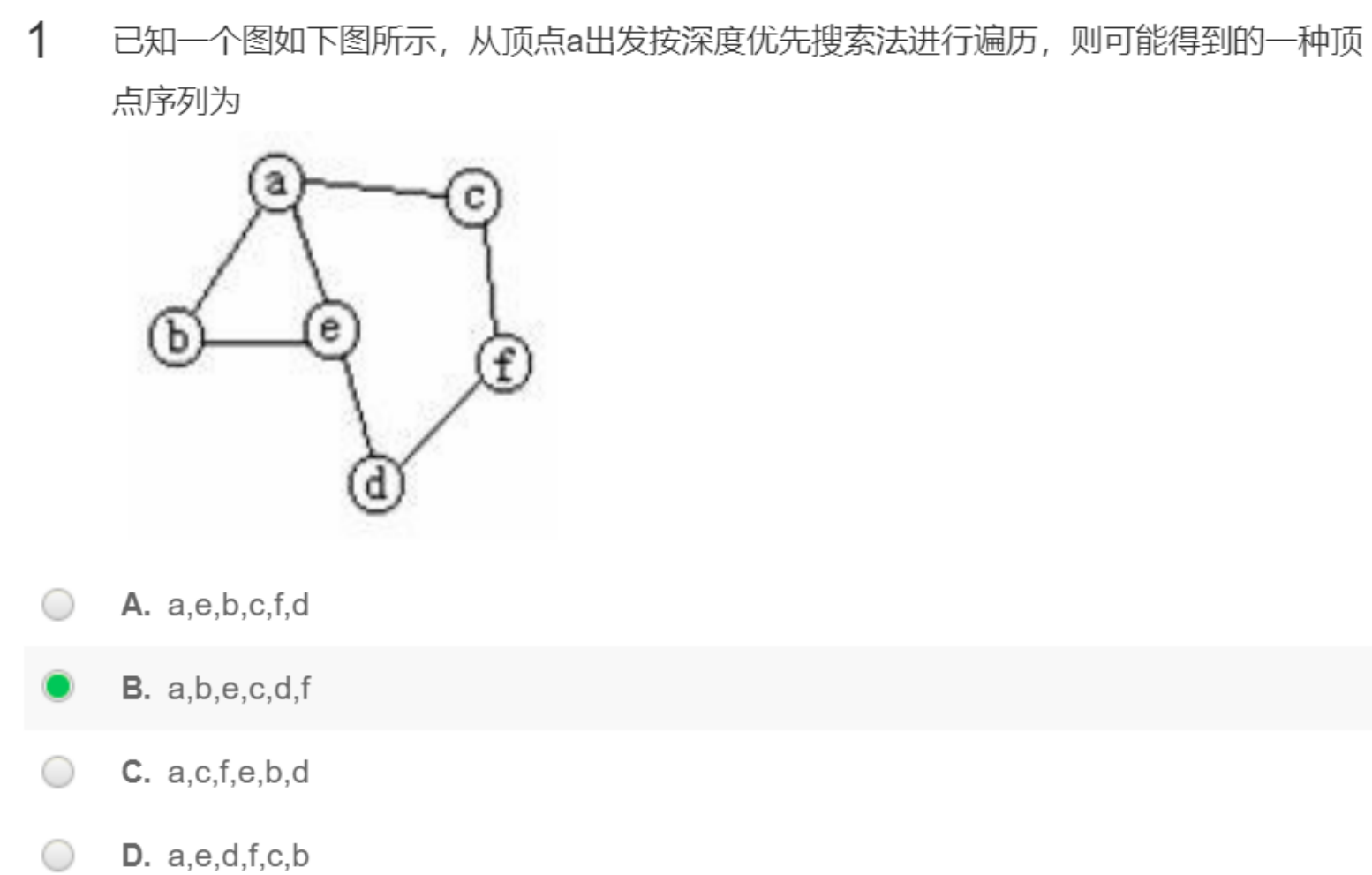
6.2.2 图的遍历——BFS
广度优先搜索(Breadth First Search,BFS)
void BFS(Vertex V)
{
visited[V] = true;
Enqueue(V,Q);//压到队列里
while(!IsEmpty(Q)){
V = Dequeue(Q);//每次循环弹出一个节点
for(V的每个邻接点W)
if(!visited[W]){//没有访问过的去访问将其压入队列中
visited[W] = true;
Enqueue(W,Q);
}
}
}
若有N个顶点,E条边,时间复杂度是
用邻接表存储图,有O(N+E)
用邻接矩阵存储图,有O(N²)实例说明
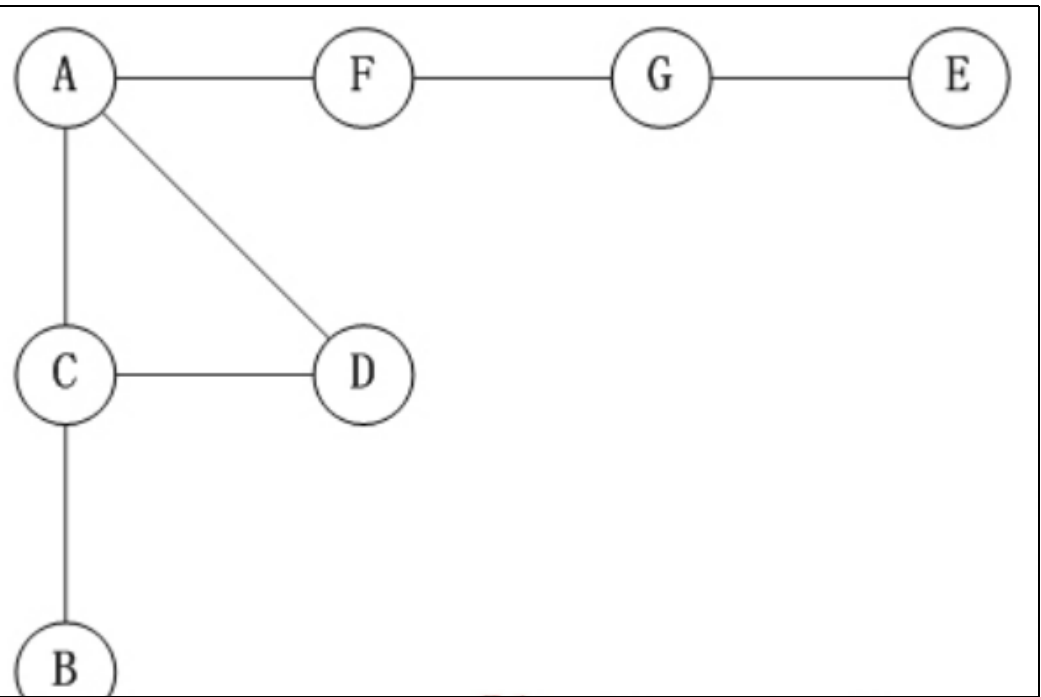
第1步:访问A。
第2步:访问(A的邻接点)C。在第1步访问A之后,接下来应该访问的是A的邻接点,即"C,D,F"中的一个。
但在本文的实现中,顶点ABCDEFG是按照顺序存储,C在"D和F"的前面,因此,先访问C。
第3步:访问(C的邻接点)B。在第2步访问C之后,接下来应该访问C的邻接点,即"B和D"中一个(A已经被
访问过,就不算在内)。而由于B在D之前,先访问B。
第4步:访问(C的邻接点)D。在第3步访问了C的邻接点B之后,B没有未被访问的邻接点;因此,返回到
访问C的另一个邻接点D。
第5步:访问(A的邻接点)F。 前面已经访问了A,并且访问完了"A的邻接点B的所有邻接点(包括递归的邻
接点在内)";因此,此时返回到访问A的另一个邻接点F。
第6步:访问(F的邻接点)G。
第7步:访问(G的邻接点)E。
因此访问顺序是:A -> C -> B -> D -> F -> G -> E。
当然,上图是基于无向图,具体的代码在文章后面实现。
广度优先搜索
广度优先搜索算法(Breadth First Search),又称为"宽度优先搜索"或"横向优先搜索",简称BFS。
它的思想是:从图中某顶点v出发,在访问了v之后依次访问v的各个未曾访问过的邻接点,然后分别从这
些邻接点出发依次访问它们的邻接点,并使得“先被访问的顶点的邻接点先于后被访问的顶点的邻接点被
访问,直至图中所有已被访问的顶点的邻接点都被访问到。如果此时图中尚有顶点未被访问,则需要另
选一个未曾被访问过的顶点作为新的起始点,重复上述过程,直至图中所有顶点都被访问到为止。
换句话说,广度优先搜索遍历图的过程是以v为起点,由近至远,依次访问和v有路径相通且路径长度为
1,2…的顶点。
实例说明
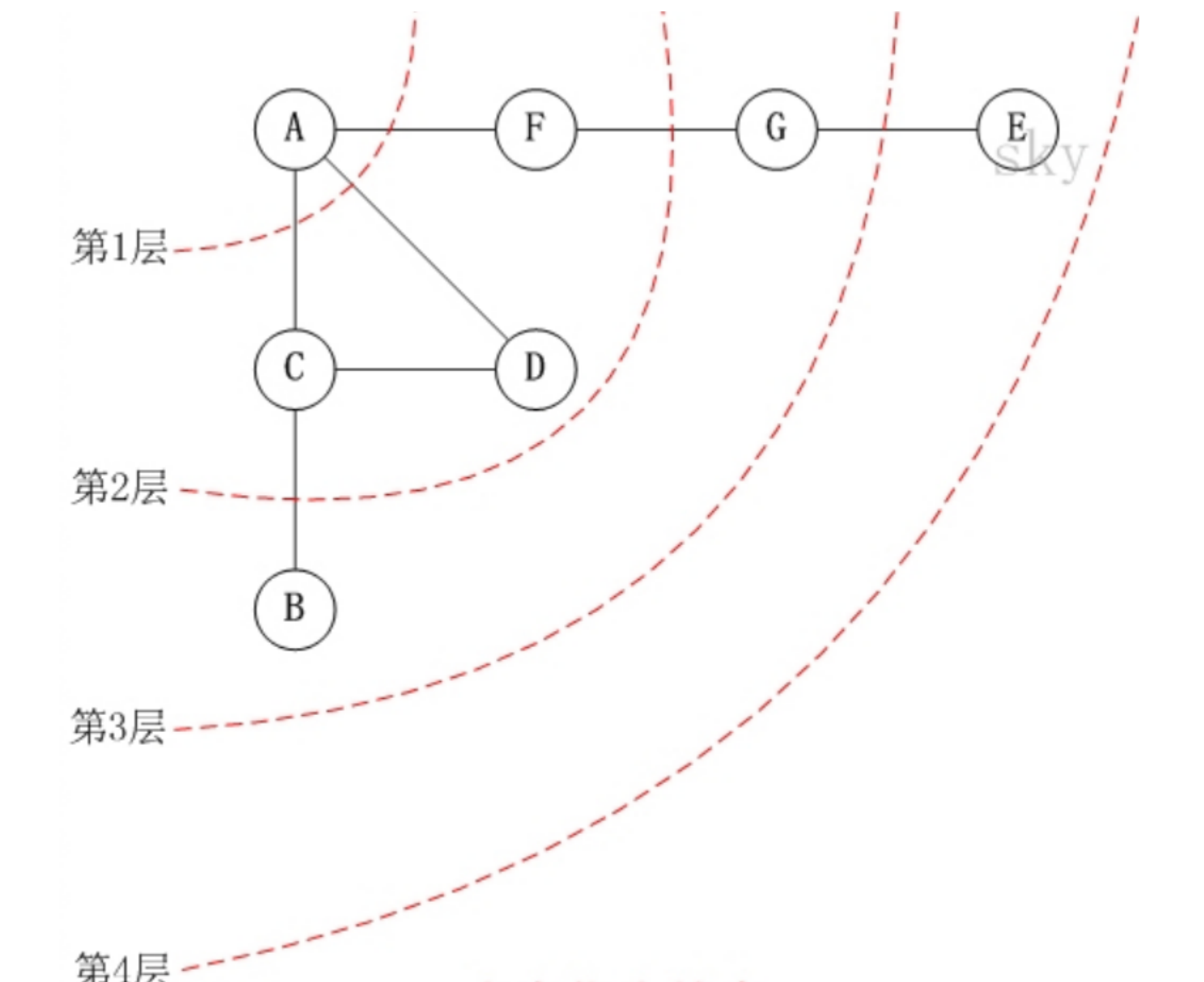
第1步:访问A。
第2步:依次访问C,D,F。在访问了A之后,接下来访问A的邻接点。前面已经说过,在本文实现中,顶点
ABCDEFG按照顺序存储的,C在"D和F"的前面,因此,先访问C。再访问完C之后,再依次访问D,F。
第3步:依次访问B,G。在第2步访问完C,D,F之后,再依次访问它们的邻接点。首先访问C的邻接点B,再
访问F的邻接点G。
第4步:访问E。在第3步访问完B,G之后,再依次访问它们的邻接点。只有G有邻接点E,因此访问G的邻
接点E。
因此访问顺序是:A -> C -> D -> F -> B -> G -> E。
6.2.3 图的遍历——为什么需要两种遍历
在不同的情况下效率不同
广度跟深度的区别
- 1. 深度是直接一条路走到黑,碰壁没路走了在返回
- 2. 广度是一圈一圈的扫描过去,虽然前面还有路也不会强行深入
6.2.4 图的遍历——图不连通怎么办
连通:如果从V到W存在一条(无向)路径,则称V与W是连通的
路径:V到W路径是一系列顶点{V,v1,v2,....,vn,W}的集合,其中任一对相邻的顶点间都有图中的边。
路径的长度是路径中的边数(如果带权(带权图),则是所有边的权重和)。如果V到W之间的所有顶点都不同, 则称为简单路径(有回路就不是简单路径)
回路:起点等于终点的路径
连通图:图中任意两顶点均连通
连通分量:无向图的极大连通子图
- 1. 极大顶点数:再加1个顶点就不连通了
- 2. 极大边数:包含子图中所有顶点相连的所有边
对有向图:
//强连通:有向图中顶点V和W之间存在双向路径,则称V和W是强连通的(路径可以不同同一条,但是一定是连
通的)
//强连通图:有向图中任意两顶点均强连通
//强连通分量:有向图的极大强连通子图
//弱连通图:将强连通图的所有边的方向抹掉变成无向图就是连通的了
每调用一次DFS(V),就把V所在的连通分量遍历了一遍,BFS也一样
void DFS(Vertex V){
visited[V] = true;
for(V的每个邻接点W)
if(!visited[W])
DFS(W);
}遍历分量
void ListComponents(Graph G){
for(each V in G)
if(!visited[V]){
DFS(V);//or BFS(V)
}
}6.3 应用实例:拯救007
void Save007(Graph G)
{
for(each V in G){
if(!visited[V] && FirstJump(V)){//这个FirstJump(V)是007第一跳有没有可能从孤岛
跳到V上有没有可能,有且没踩过就跳上去
answer = DFS(V);//or BFS(V)
if(answer == YES) break;0
}
}
if(answer == YES) output("Yes");
else output("No");
}DFS算法
void DFS(Vertex V)
{
visited[V] = true;//表示鳄鱼头踩过了
for(V的每个邻接点W)
if(!visited[W])
DFS(W);//递归
}改良版本
void DFS(Vertex V)
{
visited[V] = true;//表示鳄鱼头踩过了
if(IOsSafe(V)) answer = YES;
else{
for(each W in G )
if(!visited[W] && Jump(V,W)){//可以从V jump跳到这个w上面,作用是算V到W之间的距
离是不是小于007可以跳跃最大距离
answer = DFS(W);//递归
if(answer == YES) break;
}
}
return answer;
}6.4 应用实例:六度空间(Six Degrees of Separation)
理论:
- 你和任何一个陌生人之间所间隔的人不会超过6个
- 给定社交网络图,请对每个节点计算符合"六度空间"理论的结点占结点总数的百分比
算法思路
1.对每个节点进行广度优先搜索
2.搜索过程中累计访问的节点数
3.需要记录"层"数,仅计算6层以内的节点数
void SDS()
{
for(each V in G){
count += BFS(V);
Output = (count/N);
}
}
//结合最初的BFS
void BFS(Vertex V)
{
visited[V] = true;count = 1;
Enqueue(V,Q);//压到队列里
while(!IsEmpty(Q)){
V = Dequeue(Q);//每次循环弹出一个节点
for(V的每个邻接点W)
if(!visited[W]){//没有访问过的去访问将其压入队列中
visited[W] = true;
Enqueue(W,Q);count++;
}
}return count;
}另外的解决方案
int BFS(Vertex V)
{
vistex[V] = true;count = 1;
level = 0;last = V;
Enqueue(V,Q);
while(!IsEmpty(Q)){
V = Dequeue(Q);
for( V的每个邻接点W)
if(!visited[W]){
visited[W] = true;
Enqueue(W,Q);count++;
tail = W;
}
if(V == last ){
level++;last = tail;
}
}
return count++;
}
- 点赞
- 收藏
- 关注作者
评论(0)