【OpenCV】 ⚠️高手勿入! 半小时学会基本操作 13⚠️ 直线检测

【摘要】
【OpenCV】 ⚠️高手勿入! 半小时学会基本操作 13⚠️ 直线检测
概述霍夫直线变换原理详解代码实战HoughLinesHoughLinesP
概述
OpenCV 是一个跨平台的...
概述
OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. (第 13 课)

霍夫直线变换
霍夫变换 (Hough Line Transform) 是图像处理中的一种特征提取技术. 通过平面空间到极值坐标空间的转换, 可以帮助我们实现直线检测. 如图:

原理详解
当我们把直线 y = kx + b 画在指标坐标系上, 如下图. 我们再从原点引线段到直线上的任一点.

我们可以得到这条线段与 x 轴的夹角为 θ, 距离是 r. 对于直线上的任一点 (x0, y0), 我们可以得到公式:

代码实战
HoughLines
格式:
cv2.HoughLines(image, rho, theta, threshold, lines=None, srn=None, stn=None, min_theta=None, max_theta=None)
- 1
参数:
- image: 输入图像
- rho: 线性搜索半径步长, 以像素为单位
- theta: 线性搜索步长, 以弧度为单位
- threshold: 累计阈值
例子:
import numpy as np
import cv2
from matplotlib import pyplot as plt
# 读取图片
image = cv2.imread("sudoku.jpg")
image_copy = image.copy()
# 转换成灰度图
image_gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 边缘检测, Sobel算子大小为3
edges = cv2.Canny(image_gray, 170, 220, apertureSize=3)
# 霍夫曼直线检测
lines = cv2.HoughLines(edges, 1, np.pi / 180, 250)
# 遍历
for line in lines:
# 获取rho和theta
rho, theta = line[0]
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(x0 + 1000 * (-b))
y1 = int(y0 + 1000 * (a))
x2 = int(x0 - 1000 * (-b))
y2 = int(y0 - 1000 * (a))
cv2.line(image_copy, (x1, y1), (x2, y2), (0, 0, 255), thickness=5)
# 图片展示
f, ax = plt.subplots(2, 2, figsize=(12, 12))
# 子图
ax[0, 0].imshow(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
ax[0, 1].imshow(image_gray, "gray")
ax[1, 0].imshow(edges, "gray")
ax[1, 1].imshow(cv2.cvtColor(image_copy, cv2.COLOR_BGR2RGB))
# 标题
ax[0, 0].set_title("original")
ax[0, 1].set_title("image gray")
ax[1, 0].set_title("image edge")
ax[1, 1].set_title("image line")
plt.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
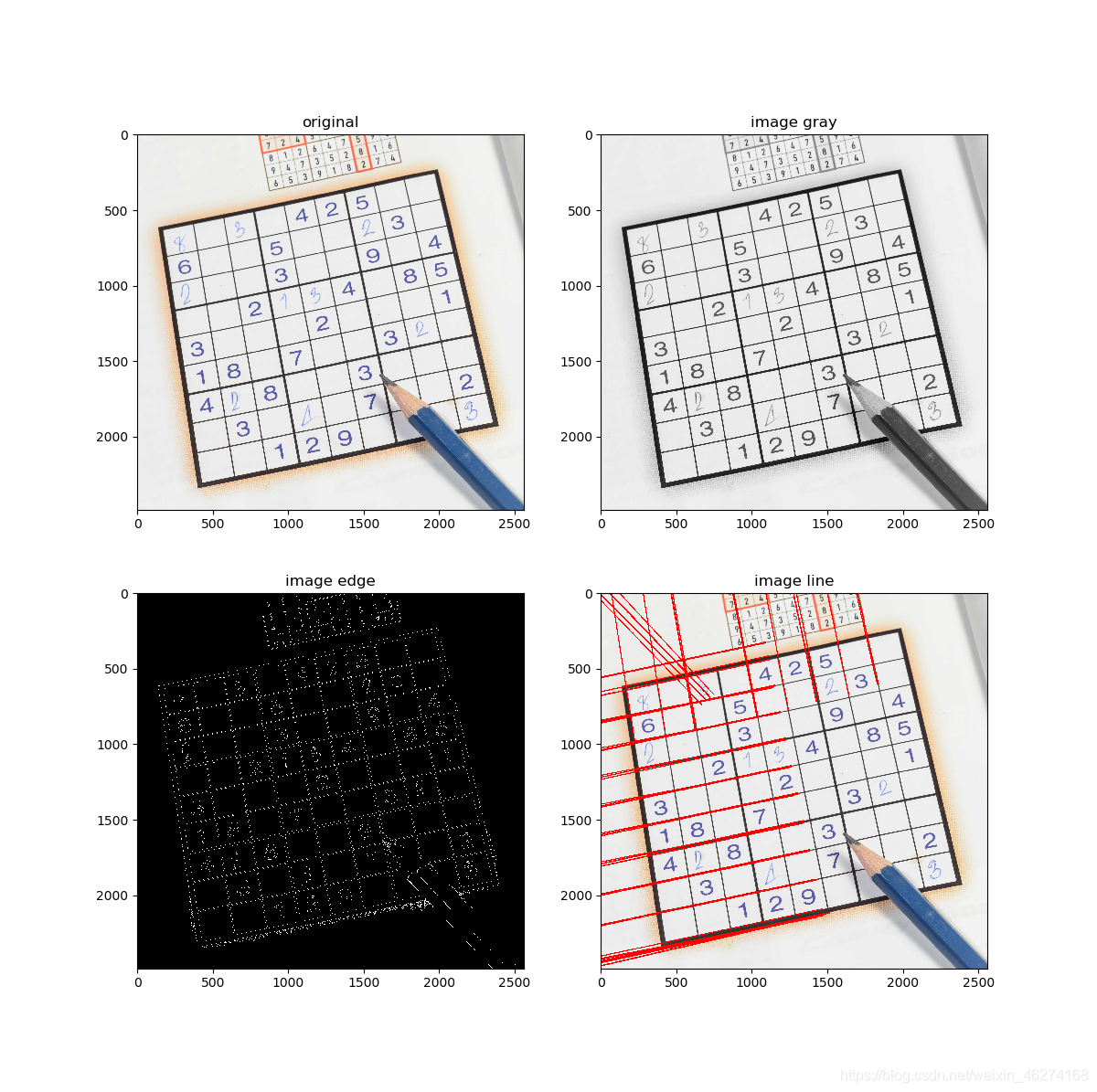
输出结果:

HoughLinesP
此函数在 HoughLines 的基础上末尾加了一个代表概率 (Probabilistic) 的 P, 表明它可以采用累计概率霍夫变换, 来找出二值图像中的直线.
格式:
HoughLinesP(image, rho, theta, threshold, lines=None, minLineLength=None, maxLineGap=None)
- 1
参数:
- image: 输入图像
- rho: 线性搜索半径步长, 以像素为单位
- theta: 线性搜索步长, 以弧度为单位
- threshold: 累计阈值
- minLineLength: 最短直线长度
- maxLineGap: 最大孔隙距离
例子:
import numpy as np
import cv2
from matplotlib import pyplot as plt
# 读取图片
image = cv2.imread("sudoku.jpg")
image_copy = image.copy()
# 转换成灰度图
image_gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 边缘检测, Sobel算子大小为3
edges = cv2.Canny(image_gray, 170, 220, apertureSize=3)
# 霍夫曼直线检测
lines = cv2.HoughLinesP(edges, 1, np.pi / 180, 100, minLineLength=100, maxLineGap=10)
# 遍历
for line in lines:
# 获取坐标
x1, y1, x2, y2 = line[0]
cv2.line(image_copy, (x1, y1), (x2, y2), (0, 0, 255), thickness=5)
# 图片展示
f, ax = plt.subplots(2, 2, figsize=(12, 12))
# 子图
ax[0, 0].imshow(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
ax[0, 1].imshow(image_gray, "gray")
ax[1, 0].imshow(edges, "gray")
ax[1, 1].imshow(cv2.cvtColor(image_copy, cv2.COLOR_BGR2RGB))
# 标题
ax[0, 0].set_title("original")
ax[0, 1].set_title("image gray")
ax[1, 0].set_title("image edge")
ax[1, 1].set_title("image line")
plt.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
输出结果:


文章来源: iamarookie.blog.csdn.net,作者:我是小白呀,版权归原作者所有,如需转载,请联系作者。
原文链接:iamarookie.blog.csdn.net/article/details/119338656

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)