OpenCV | ORB特征检测与描述

【摘要】 ORB (Oriented FAST and Rotated BRIEF)
ORB基本上是FAST关键点检测器和Brief描述符的融合,并进行了许多修改以增强性能。首先,它使用FAST查找关键点,然后应用哈里斯角点度量在其中找到前N个点。它还使用金字塔生成多尺度特征。但是一个问题是,FAST无法计算方向。那么旋转不变性呢?作者提出以下修改。
它计算角点位于中心的贴片的强度...
ORB (Oriented FAST and Rotated BRIEF)
ORB基本上是FAST关键点检测器和Brief描述符的融合,并进行了许多修改以增强性能。首先,它使用FAST查找关键点,然后应用哈里斯角点度量在其中找到前N个点。它还使用金字塔生成多尺度特征。但是一个问题是,FAST无法计算方向。那么旋转不变性呢?作者提出以下修改。
它计算角点位于中心的贴片的强度加权质心。从此角点到质心的矢量方向确定了方向。为了改善旋转不变性,使用x和y计算矩,它们应该在半径为的圆形区域中 ,其中补丁的大小。
,其中补丁的大小。
现在,对于描述符,ORB使用Brief描述符。但是我们已经看到,BRIEF的旋转性能很差。因此,ORB所做的就是根据关键点的方向“引导” BRIEF。对于位置的任何二进制测试 功能集,请定义一个矩阵,其中包含这些像素的坐标。然后使用补丁的方向,找到其旋转矩阵并旋转以获得转向(旋转)版本。
-
import numpy as np
-
import cv2
-
from matplotlib import pyplot as plt
-
-
img = cv2.imread('molecule.png',0)
-
-
# Initiate STAR detector
-
orb = cv2.ORB_create()
-
-
# find the keypoints with ORB
-
kp = orb.detect(img,None)
-
-
# compute the descriptors with ORB
-
kp, des = orb.compute(img, kp)
-
-
# draw only keypoints location,not size and orientation
-
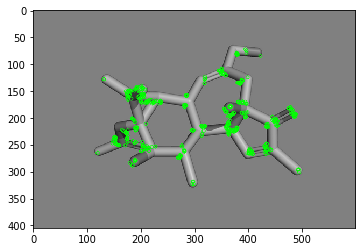
img2 = cv2.drawKeypoints(img,kp,color=(0,255,0), flags=0,outImage=None)
-
-
cv2.imwrite('sift_keypoints.jpg',img)
-
-
plt.imshow(img2),plt.show()
原图
参考:
文章来源: drugai.blog.csdn.net,作者:DrugAI,版权归原作者所有,如需转载,请联系作者。
原文链接:drugai.blog.csdn.net/article/details/103008050

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)