深度学习和目标检测系列教程 12-300:常见的opencv的APi和用法总结

【摘要】 @Author:Runsen
由于CV需要熟练使用opencv,因此总结了opencv常见的APi和用法。
OpenCV(opensourcecomputervision)于1999年正式推出,它来自英特尔的一项倡议。
OpenCV的核心是用C++编写的。在Python中,我们只使用一个包装器,它在Python内部执行C++代码。 它对于几乎所有的计算机视觉应...
@Author:Runsen
由于CV需要熟练使用opencv,因此总结了opencv常见的APi和用法。
OpenCV(opensourcecomputervision)于1999年正式推出,它来自英特尔的一项倡议。
-
OpenCV的核心是用C++编写的。在Python中,我们只使用一个包装器,它在Python内部执行C++代码。
-
它对于几乎所有的计算机视觉应用程序都非常有用,并且在Windows、Linux、MacOS、Android、iOS上受支持,并绑定到Python、Java和Matlab。
锐化
USM锐化的全称是:Unsharp Mask,译为「模糊掩盖锐化处理」,是一种胶片时代处理图片锐度的手法,延续到数码时代的产物。在胶片时代,我们通过将模糊的负片与正片叠加可产生边缘锐化的效果。
对,锐化的效果离不开模糊,甚至可以说,锐化的效果就是来源于模糊。USM的锐化实际上就是利用原图和模糊图产生的反差,来实现锐化图片的效果。
公式:(源图像– w*高斯模糊)/(1-w);其中w表示权重(0.1~0.9)。
我感觉我喜欢上,毕业前在学校自拍的照片
import numpy as np
import matplotlib.pyplot as plt
import cv2
image = cv2.imread('demo.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(1, 2, 1)
plt.title("Original")
plt.imshow(image)
# Create our shapening kernel
# the values in the matrix sum to 1
kernel_sharpening = np.array([[-1,-1,-1], [-1,9,-1], [-1,-1,-1]])
# 对输入图像应用不同的内核
sharpened = cv2.filter2D(image, -1, kernel_sharpening)
plt.subplot(1, 2, 2)
plt.title("Image Sharpening")
plt.imshow(sharpened)
plt.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28

阈值化、二值化
image = cv2.imread('demo.jpg', 0)
plt.figure(figsize=(30, 30))
plt.subplot(3, 2, 1)
plt.title("Original")
plt.imshow(image)
# 小于127的值变为0(黑色,大于等于255(白色)
ret,thresh1 = cv2.threshold(image, 127, 255, cv2.THRESH_BINARY)
plt.subplot(3, 2, 2)
plt.title("Threshold Binary")
plt.imshow(thresh1)
# 模糊图像,消除噪音
image = cv2.GaussianBlur(image, (3, 3), 0)
# adaptiveThreshold
thresh = cv2.adaptiveThreshold(image, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 3, 5)
plt.subplot(3, 2, 3)
plt.title("Adaptive Mean Thresholding")
plt.imshow(thresh)
_, th2 = cv2.threshold(image, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
plt.subplot(3, 2, 4)
plt.title("Otsu's Thresholding")
plt.imshow(th2)
plt.subplot(3, 2, 5)
# 高斯滤波后的大津阈值法
blur = cv2.GaussianBlur(image, (5,5), 0)
_, th3 = cv2.threshold(blur, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
plt.title("Guassian Otsu's Thresholding")
plt.imshow(th3)
plt.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41

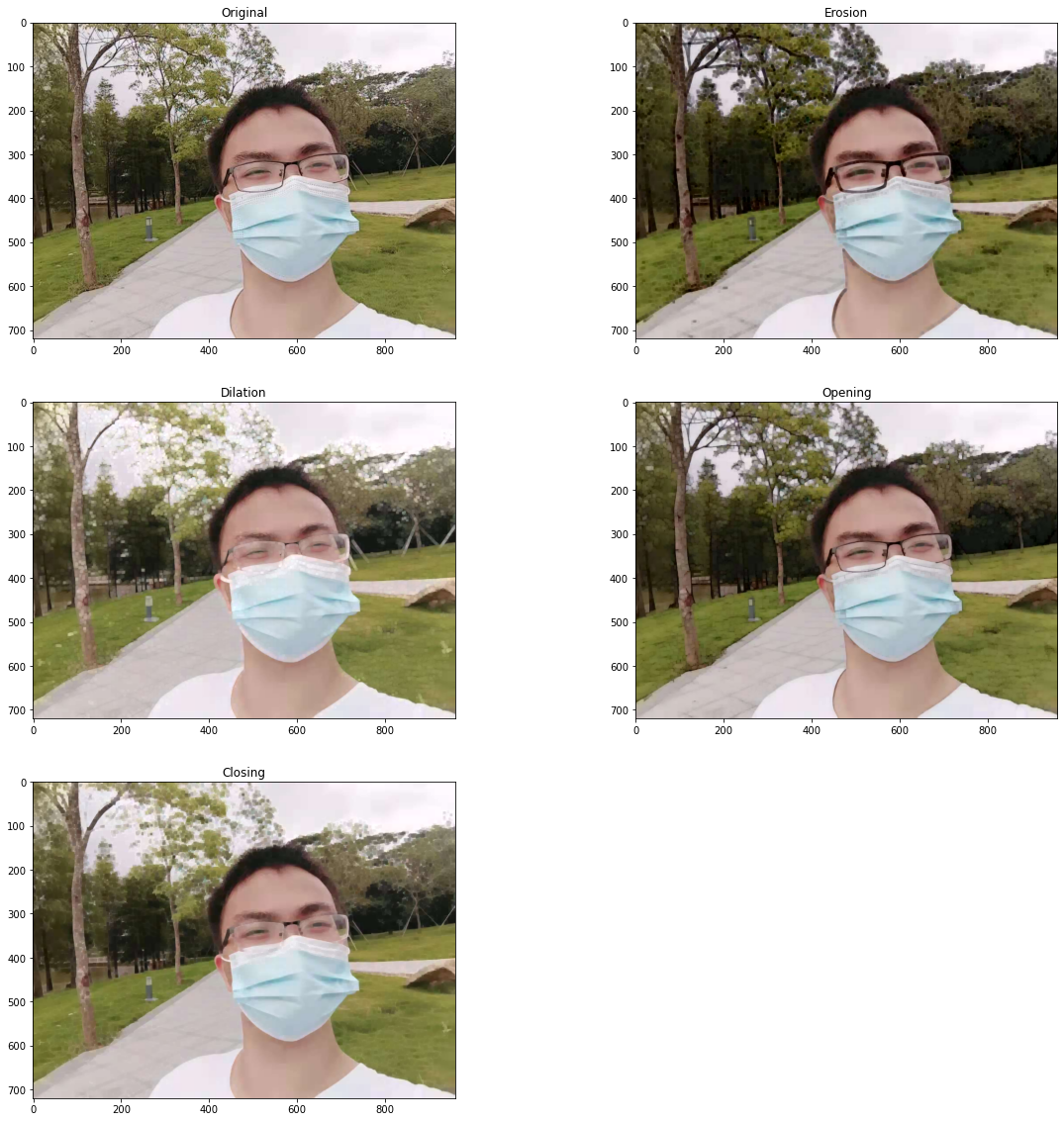
降噪
image = cv2.imread('demo.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(3, 2, 1)
plt.title("Original")
plt.imshow(image)
# Let's define our kernel size
kernel = np.ones((5,5), np.uint8)
# Now we erode
erosion = cv2.erode(image, kernel, iterations = 1)
plt.subplot(3, 2, 2)
plt.title("Erosion")
plt.imshow(erosion)
dilation = cv2.dilate(image, kernel, iterations = 1)
plt.subplot(3, 2, 3)
plt.title("Dilation")
plt.imshow(dilation)
# Opening - Good for removing noise
opening = cv2.morphologyEx(image, cv2.MORPH_OPEN, kernel)
plt.subplot(3, 2, 4)
plt.title("Opening")
plt.imshow(opening)
# Closing - Good for removing noise
closing = cv2.morphologyEx(image, cv2.MORPH_CLOSE, kernel)
plt.subplot(3, 2, 5)
plt.title("Closing")
plt.imshow(closing)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
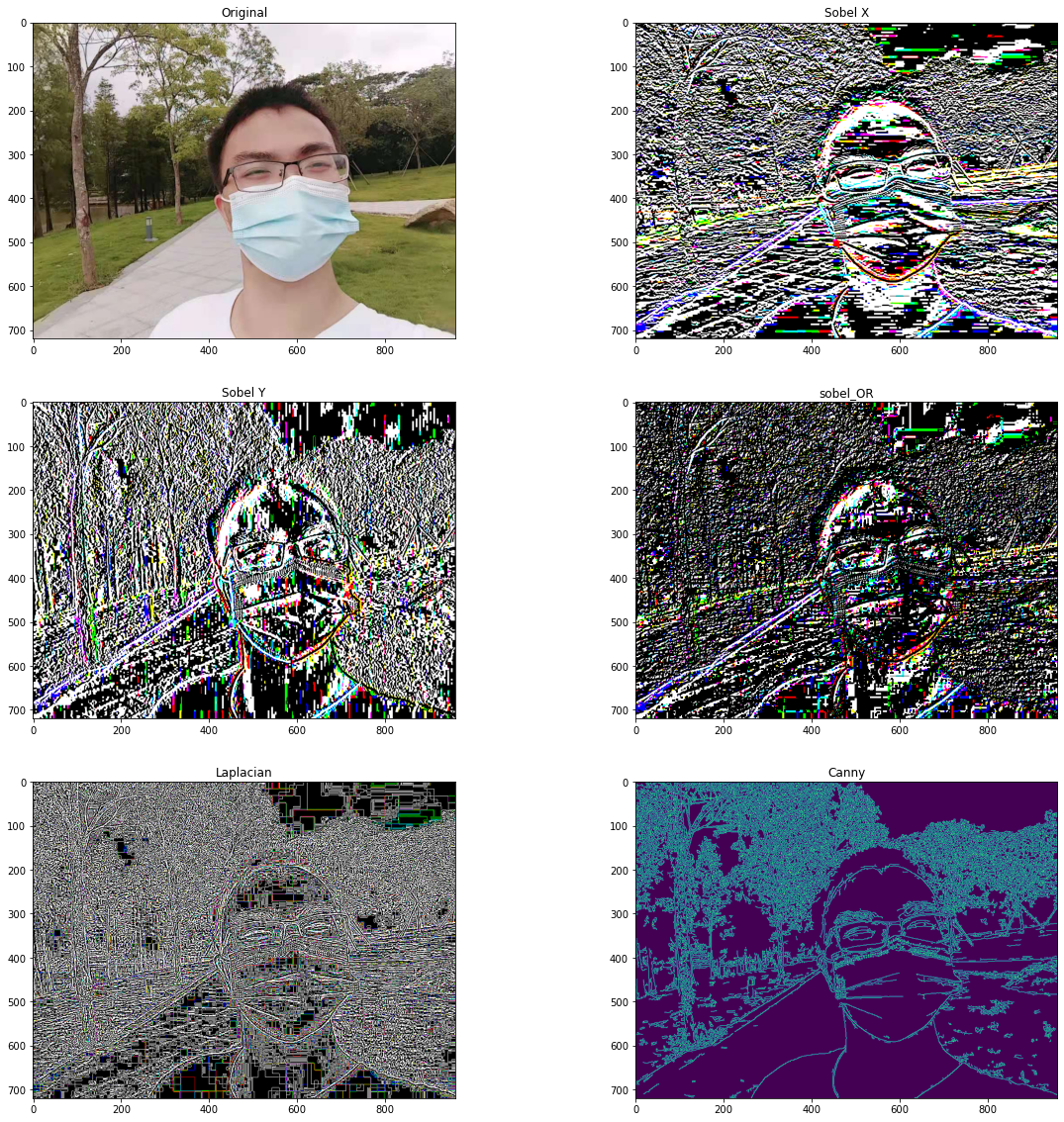
边缘检测与图像梯度
image = cv2.imread('demo.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
height, width,_ = image.shape
# Extract Sobel Edges
sobel_x = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=5)
sobel_y = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=5)
plt.figure(figsize=(20, 20))
plt.subplot(3, 2, 1)
plt.title("Original")
plt.imshow(image)
plt.subplot(3, 2, 2)
plt.title("Sobel X")
plt.imshow(sobel_x)
plt.subplot(3, 2, 3)
plt.title("Sobel Y")
plt.imshow(sobel_y)
sobel_OR = cv2.bitwise_or(sobel_x, sobel_y)
plt.subplot(3, 2, 4)
plt.title("sobel_OR")
plt.imshow(sobel_OR)
laplacian = cv2.Laplacian(image, cv2.CV_64F)
plt.subplot(3, 2, 5)
plt.title("Laplacian")
plt.imshow(laplacian)
## 提供两个值:threshold1和threshold2。任何大于threshold2的梯度值。低于threshold1的任何值都不被视为边。
# threshold1和threshold2之间的值可以根据其大小分类为边或非边
# 在这种情况下,低于60的任何渐变值都被视为非边
# 而大于120的任何值都被视为边。
# The first threshold gradient
canny = cv2.Canny(image, 50, 120)
plt.subplot(3, 2, 6)
plt.title("Canny")
plt.imshow(canny)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
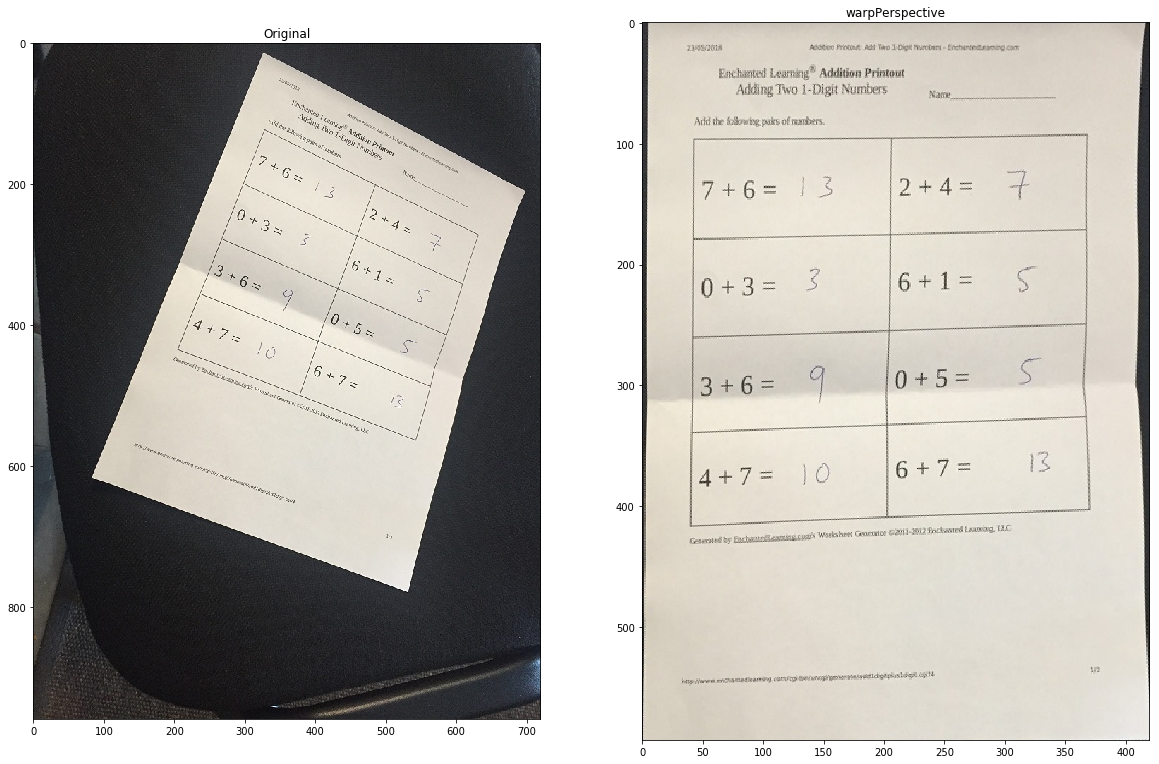
透视变换
image = cv2.imread('scan.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(1, 2, 1)
plt.title("Original")
plt.imshow(image)
# 原始图像四个角的坐标
points_A = np.float32([[320,15], [700,215], [85,610], [530,780]])
# 所需输出的4个角的坐标
# 使用A4纸的比例是1:1.41
points_B = np.float32([[0,0], [420,0], [0,594], [420,594]])
# 使用两组四个点进行计算
# 透视变换矩阵,M
M = cv2.getPerspectiveTransform(points_A, points_B)
warped = cv2.warpPerspective(image, M, (420,594))
plt.subplot(1, 2, 2)
plt.title("warpPerspective")
plt.imshow(warped)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
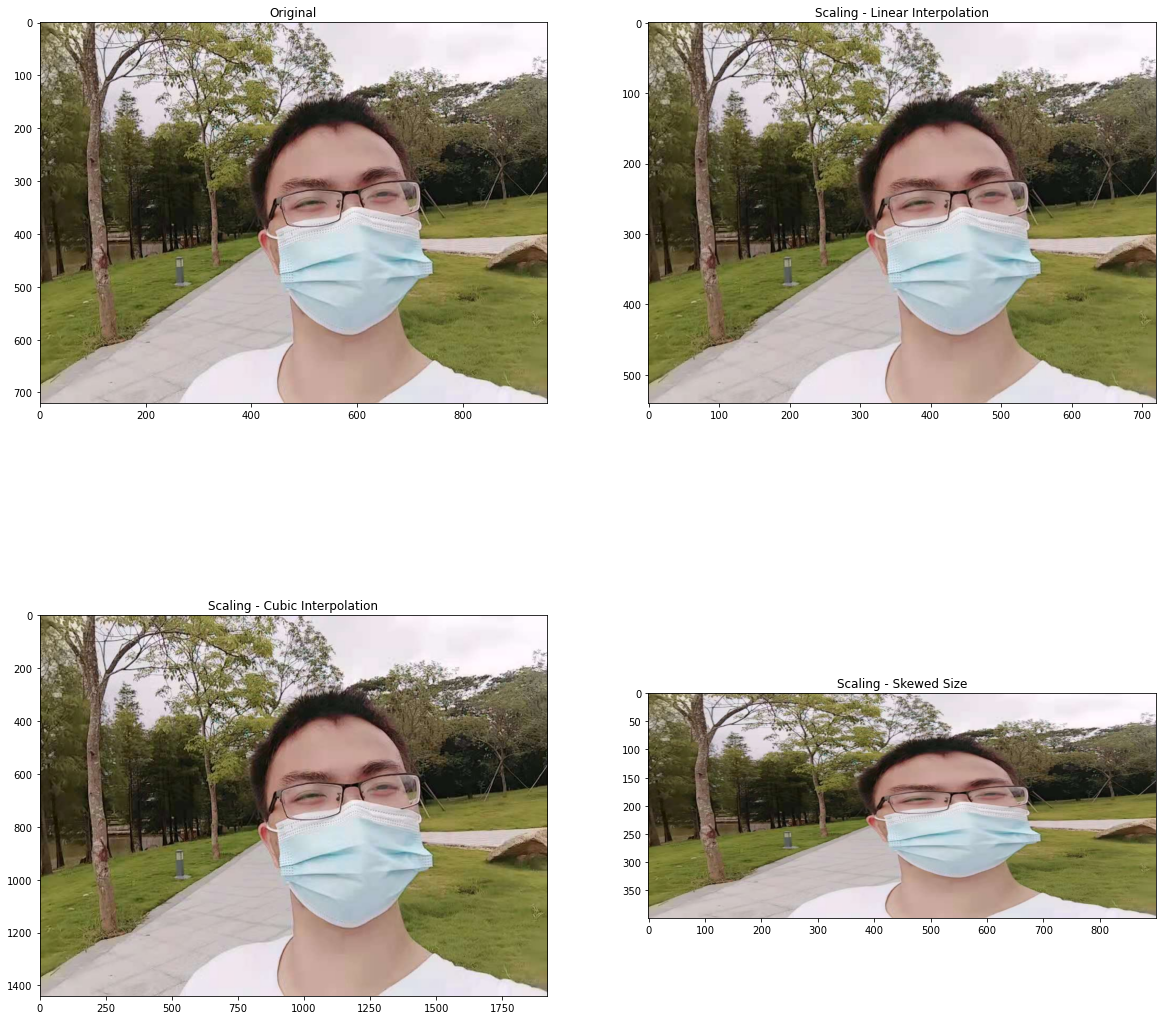
缩放、重新调整大小和插值
使用cv2.resize函数可以很容易地重新调整大小,它的参数有:cv2.resize(image,dsize(output image size),x scale,y scale,interpolation)
image = cv2.imread('demo.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(2, 2, 1)
plt.title("Original")
plt.imshow(image)
# Let's make our image 3/4 of it's original size
image_scaled = cv2.resize(image, None, fx=0.75, fy=0.75)
plt.subplot(2, 2, 2)
plt.title("Scaling - Linear Interpolation")
plt.imshow(image_scaled)
# Let's double the size of our image
img_scaled = cv2.resize(image, None, fx=2, fy=2, interpolation = cv2.INTER_CUBIC)
plt.subplot(2, 2, 3)
plt.title("Scaling - Cubic Interpolation")
plt.imshow(img_scaled)
# Let's skew the re-sizing by setting exact dimensions
img_scaled = cv2.resize(image, (900, 400), interpolation = cv2.INTER_AREA)
plt.subplot(2, 2, 4)
plt.title("Scaling - Skewed Size")
plt.imshow(img_scaled)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
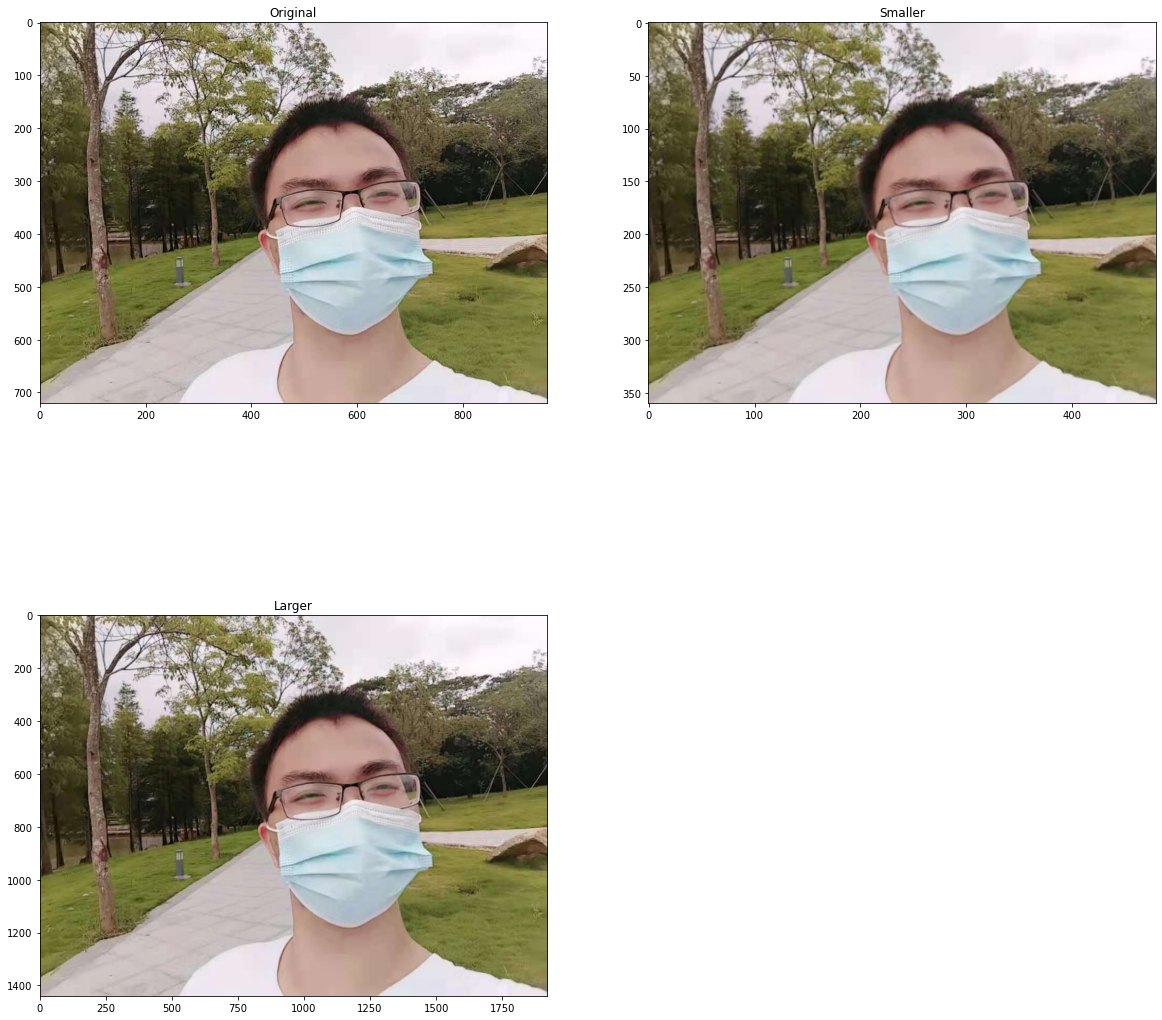
影像金字塔
在目标检测中缩放图像时非常有用。
image = cv2.imread('demo.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(2, 2, 1)
plt.title("Original")
plt.imshow(image)
smaller = cv2.pyrDown(image)
larger = cv2.pyrUp(image)
plt.subplot(2, 2, 2)
plt.title("Smaller")
plt.imshow(smaller)
plt.subplot(2, 2, 3)
plt.title("Larger")
plt.imshow(larger)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
裁剪
image = cv2.imread('demo.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(2, 2, 1)
plt.title("Original")
plt.imshow(image)
height, width = image.shape[:2]
# Let's get the starting pixel coordiantes (top left of cropping rectangle)
start_row, start_col = int(height * .25), int(width * .25)
# Let's get the ending pixel coordinates (bottom right)
end_row, end_col = int(height * .75), int(width * .75)
# Simply use indexing to crop out the rectangle we desire
cropped = image[start_row:end_row , start_col:end_col]
plt.subplot(2, 2, 2)
plt.title("Cropped")
plt.imshow(cropped)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24

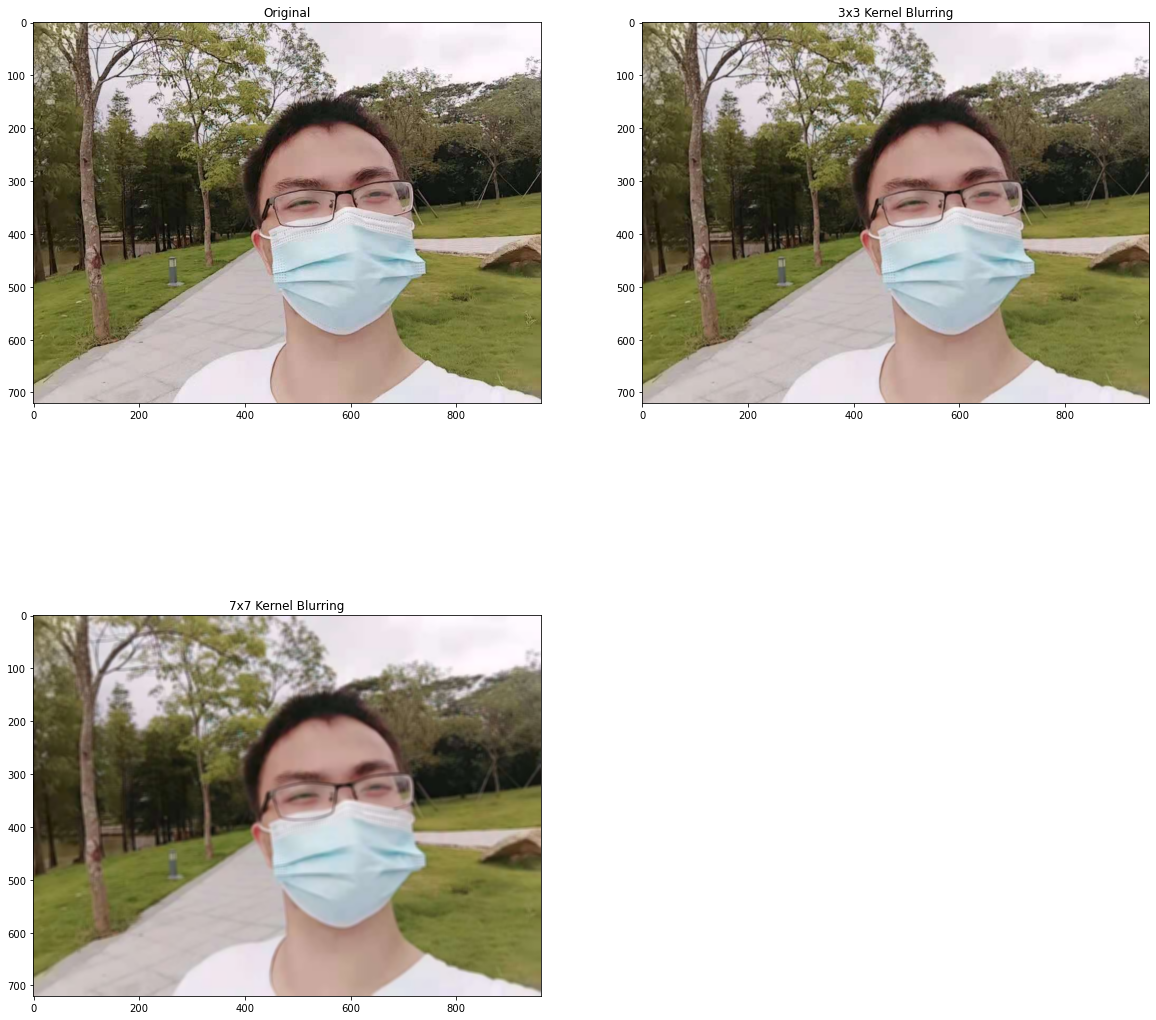
模糊
image = cv2.imread('demo.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(2, 2, 1)
plt.title("Original")
plt.imshow(image)
# Creating our 3 x 3 kernel
kernel_3x3 = np.ones((3, 3), np.float32) / 9
# We use the cv2.fitler2D to conovlve the kernal with an image
blurred = cv2.filter2D(image, -1, kernel_3x3)
plt.subplot(2, 2, 2)
plt.title("3x3 Kernel Blurring")
plt.imshow(blurred)
# Creating our 7 x 7 kernel
kernel_7x7 = np.ones((7, 7), np.float32) / 49
blurred2 = cv2.filter2D(image, -1, kernel_7x7)
plt.subplot(2, 2, 3)
plt.title("7x7 Kernel Blurring")
plt.imshow(blurred2)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
Contours
# Let's load a simple image with 3 black squares
image = cv2.imread('demo.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(20, 20))
plt.subplot(2, 2, 1)
plt.title("Original")
plt.imshow(image)
# Grayscale
gray = cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
# Find Canny edges
edged = cv2.Canny(gray, 30, 200)
plt.subplot(2, 2, 2)
plt.title("Canny Edges")
plt.imshow(edged)
# Finding Contours
# Use a copy of your image e.g. edged.copy(), since findContours alters the image
contours, hierarchy = cv2.findContours(edged, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
plt.subplot(2, 2, 3)
plt.title("Canny Edges After Contouring")
plt.imshow(edged)
print("Number of Contours found = " + str(len(contours)))
# Draw all contours
# Use '-1' as the 3rd parameter to draw all
cv2.drawContours(image, contours, -1, (0,255,0), 3)
plt.subplot(2, 2, 4)
plt.title("Contours")
plt.imshow(image)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39

文章来源: maoli.blog.csdn.net,作者:刘润森!,版权归原作者所有,如需转载,请联系作者。
原文链接:maoli.blog.csdn.net/article/details/118579330

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)