鸿蒙智慧农业案例代码分享,效果视频展示

【摘要】 本篇所有内容来自:https://gitee.com/bearpi/bearpi-hm_nano如果您想快速的体验一下HarmonyOS的源码[获取]、[编译]、[烧录]过程,强烈建议您学习以下教程,这能让您在环境安装环节省下不少时间。十分钟上手体验首先你需要购买一块 小熊派 鸿蒙,季开发版 ,https://item.taobao.com/item.htm?id=633296694816B...

本篇所有内容来自:https://gitee.com/bearpi/bearpi-hm_nano
如果您想快速的体验一下HarmonyOS的源码[获取]、[编译]、[烧录]过程,强烈建议您学习以下教程,这能让您在环境安装环节省下不少时间。
十分钟上手体验
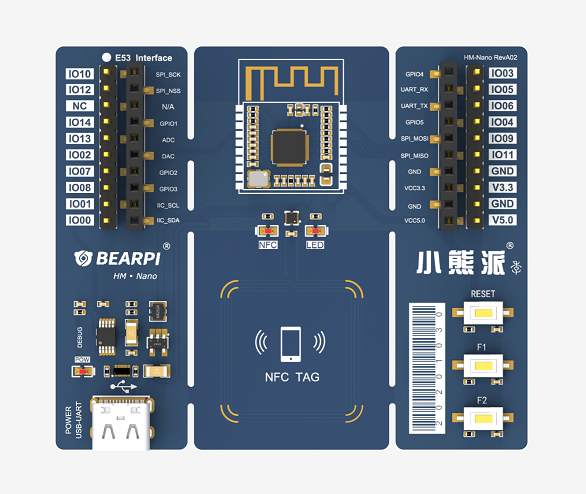
首先你需要购买一块 小熊派 鸿蒙,季开发版 ,https://item.taobao.com/item.htm?id=633296694816
BearPi-HM Nano,不知道小熊派有没有意向发展推广代理商,
BearPi-HM Nano是一片73.2mm * 62.7mm * 11.1mm大小的开发板,外型上延续了三段式设计,板上搭载有丰富的资源外设,同时,开发板搭载HarmonyOS操作系统,并配套有DevEco Device Tool开发、调试环境,全套教程以及实验案例。
这次实战我 安装了 智慧农业 E53扩展板 ,插上不同的 扩展板,烧录不同的 程序,可以达到不同的 效果 。截止到 7月初 ,gitee 上 共有13个案例 ,都可以快速上手。

当然最基础的 虚拟环境安装,通讯功能需要自己提前学习准备,,hiburn 工具的 使用还是比较简单 ,容易上手
用RaiDrive 打通 Ubuntu 环境 和Windows ,把代码 拖入 vscode ,更方便 编辑查看。
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <unistd.h>
#include "ohos_init.h"
#include "cmsis_os2.h"
#include "wifi_connect.h"
#include <queue.h>
#include <oc_mqtt_al.h>
#include <oc_mqtt_profile.h>
#include "E53_IA1.h"
#include <dtls_al.h>
#include <mqtt_al.h>
#define CONFIG_WIFI_SSID "XXX" //修改为自己的WiFi 热点账号
#define CONFIG_WIFI_PWD "XXX" //修改为自己的WiFi 热点密码
#define CONFIG_APP_SERVERIP "121.36.42.100"
#define CONFIG_APP_SERVERPORT "1883"
#define CONFIG_APP_DEVICEID "60dXXX8_Harmony" //替换为注册设备后生成的deviceid
#define CONFIG_APP_DEVICEPWD "0f2aXXXXX0951" //替换为注册设备后生成的密钥
然后就是 自己在 华为云平台 产品 设备 里 注册的 设备 生成 的 ID 和密钥 ,复制进来 ,记得保存 ,然后就可以 编译
python build.py 后面是开发板名称 , BearPi-HM_Nano
#define CONFIG_APP_LIFETIME 60 ///< seconds
#define CONFIG_QUEUE_TIMEOUT (5*1000)
#define MSGQUEUE_OBJECTS 16 // number of Message Queue Objects
osMessageQueueId_t mid_MsgQueue; // message queue id
typedef enum
{
en_msg_cmd = 0,
en_msg_report,
en_msg_conn,
en_msg_disconn,
}en_msg_type_t;
typedef struct
{
char *request_id;
char *payload;
} cmd_t;
typedef struct
{
int lum;
int temp;
int hum;
} report_t;
typedef struct
{
en_msg_type_t msg_type;
union
{
cmd_t cmd;
report_t report;
} msg;
} app_msg_t;
typedef struct
{
queue_t *app_msg;
int connected;
int led;
int motor;
}app_cb_t;
static app_cb_t g_app_cb;
static void deal_report_msg(report_t *report)
{
oc_mqtt_profile_service_t service;
oc_mqtt_profile_kv_t temperature;
oc_mqtt_profile_kv_t humidity;
oc_mqtt_profile_kv_t luminance;
oc_mqtt_profile_kv_t led;
oc_mqtt_profile_kv_t motor;
if(g_app_cb.connected != 1){
return;
}
service.event_time = NULL;
service.service_id = "Agriculture";
service.service_property = &temperature;
service.nxt = NULL;
temperature.key = "Temperature";
temperature.value = &report->temp;
temperature.type = EN_OC_MQTT_PROFILE_VALUE_INT;
temperature.nxt = &humidity;
humidity.key = "Humidity";
humidity.value = &report->hum;
humidity.type = EN_OC_MQTT_PROFILE_VALUE_INT;
humidity.nxt = &luminance;
luminance.key = "Luminance";
luminance.value = &report->lum;
luminance.type = EN_OC_MQTT_PROFILE_VALUE_INT;
luminance.nxt = &led;
led.key = "LightStatus";
led.value = g_app_cb.led?"ON":"OFF";
led.type = EN_OC_MQTT_PROFILE_VALUE_STRING;
led.nxt = &motor;
motor.key = "MotorStatus";
motor.value = g_app_cb.motor?"ON":"OFF";
motor.type = EN_OC_MQTT_PROFILE_VALUE_STRING;
motor.nxt = NULL;
oc_mqtt_profile_propertyreport(NULL,&service);
return;
}
//use this function to push all the message to the buffer
使用 这 功能 到 推 全部的 这个 消息 到 这个 缓冲器
static int msg_rcv_callback(oc_mqtt_profile_msgrcv_t *msg)
{
int ret = 0;
char *buf;
int buf_len;
app_msg_t *app_msg;
if((NULL == msg)|| (msg->request_id == NULL) || (msg->type != EN_OC_MQTT_PROFILE_MSG_TYPE_DOWN_COMMANDS)){
return ret;
}
buf_len = sizeof(app_msg_t) + strlen(msg->request_id) + 1 + msg->msg_len + 1;
buf = malloc(buf_len);
if(NULL == buf){
return ret;
}
app_msg = (app_msg_t *)buf;
buf += sizeof(app_msg_t);
app_msg->msg_type = en_msg_cmd;
app_msg->msg.cmd.request_id = buf;
buf_len = strlen(msg->request_id);
buf += buf_len + 1;
memcpy(app_msg->msg.cmd.request_id, msg->request_id, buf_len);
app_msg->msg.cmd.request_id[buf_len] = '\0';
buf_len = msg->msg_len;
app_msg->msg.cmd.payload = buf;
memcpy(app_msg->msg.cmd.payload, msg->msg, buf_len);
app_msg->msg.cmd.payload[buf_len] = '\0';
ret = queue_push(g_app_cb.app_msg,app_msg,10);
if(ret != 0){
free(app_msg);
}
return ret;
}
///< COMMAND DEAL
命令 判定鉴定与逻辑
#include <cJSON.h>
static void deal_cmd_msg(cmd_t *cmd)
{
cJSON *obj_root;
cJSON *obj_cmdname;
cJSON *obj_paras;
cJSON *obj_para;
int cmdret = 1;
oc_mqtt_profile_cmdresp_t cmdresp;
obj_root = cJSON_Parse(cmd->payload);
if (NULL == obj_root)
{
goto EXIT_JSONPARSE;
}
obj_cmdname = cJSON_GetObjectItem(obj_root, "command_name");
if (NULL == obj_cmdname)
{
goto EXIT_CMDOBJ;
}
if (0 == strcmp(cJSON_GetStringValue(obj_cmdname), "Agriculture_Control_light"))
{
obj_paras = cJSON_GetObjectItem(obj_root, "paras");
if (NULL == obj_paras)
{
goto EXIT_OBJPARAS;
}
obj_para = cJSON_GetObjectItem(obj_paras, "Light");
if (NULL == obj_para)
{
goto EXIT_OBJPARA;
}
///< operate the LED here
if (0 == strcmp(cJSON_GetStringValue(obj_para), "ON"))
{
g_app_cb.led = 1;
Light_StatusSet(ON);
printf("Light On!\r\n");
}
else
{
g_app_cb.led = 0;
Light_StatusSet(OFF);
printf("Light Off!\r\n");
}
cmdret = 0;
}
else if (0 == strcmp(cJSON_GetStringValue(obj_cmdname), "Agriculture_Control_Motor"))
{
obj_paras = cJSON_GetObjectItem(obj_root, "Paras");
if (NULL == obj_paras)
{
goto EXIT_OBJPARAS;
}
obj_para = cJSON_GetObjectItem(obj_paras, "Motor");
if (NULL == obj_para)
{
goto EXIT_OBJPARA;
}
///< operate the Motor here
if (0 == strcmp(cJSON_GetStringValue(obj_para), "ON"))
{
g_app_cb.motor = 1;
Motor_StatusSet(ON);
printf("Motor On!\r\n");
}
else
{
g_app_cb.motor = 0;
Motor_StatusSet(OFF);
printf("Motor Off!\r\n");
}
cmdret = 0;
}
EXIT_OBJPARA:
EXIT_OBJPARAS:
EXIT_CMDOBJ:
cJSON_Delete(obj_root);
EXIT_JSONPARSE:
///< do the response
cmdresp.paras = NULL;
cmdresp.request_id = cmd->request_id;
cmdresp.ret_code = cmdret;
cmdresp.ret_name = NULL;
(void)oc_mqtt_profile_cmdresp(NULL, &cmdresp);
return;
}
static int task_main_entry(void)
{
app_msg_t *app_msg;
uint32_t ret ;
WifiConnect(CONFIG_WIFI_SSID, CONFIG_WIFI_PWD);
dtls_al_init();
mqtt_al_init();
oc_mqtt_init();
g_app_cb.app_msg = queue_create("queue_rcvmsg",10,1);
if(NULL == g_app_cb.app_msg){
printf("Create receive msg queue failed");
}
oc_mqtt_profile_connect_t connect_para;
(void) memset( &connect_para, 0, sizeof(connect_para));
connect_para.boostrap = 0;
connect_para.device_id = CONFIG_APP_DEVICEID;
connect_para.device_passwd = CONFIG_APP_DEVICEPWD;
connect_para.server_addr = CONFIG_APP_SERVERIP;
connect_para.server_port = CONFIG_APP_SERVERPORT;
connect_para.life_time = CONFIG_APP_LIFETIME;
connect_para.rcvfunc = msg_rcv_callback;
connect_para.security.type = EN_DTLS_AL_SECURITY_TYPE_NONE;
ret = oc_mqtt_profile_connect(&connect_para);
if((ret == (int)en_oc_mqtt_err_ok)){
g_app_cb.connected = 1;
printf("oc_mqtt_profile_connect succed!\r\n");
}
else
{
printf("oc_mqtt_profile_connect faild!\r\n");
}
while (1)
{
app_msg = NULL;
(void)queue_pop(g_app_cb.app_msg,(void **)&app_msg,0xFFFFFFFF);
if(NULL != app_msg){
switch(app_msg->msg_type){
case en_msg_cmd:
deal_cmd_msg(&app_msg->msg.cmd);
break;
case en_msg_report:
deal_report_msg(&app_msg->msg.report);
break;
default:
break;
}
free(app_msg);
}
}
return 0;
}
static int task_sensor_entry(void)
{
app_msg_t *app_msg;
E53_IA1_Data_TypeDef data;
E53_IA1_Init();
while (1)
{
E53_IA1_Read_Data(&data);
app_msg = malloc(sizeof(app_msg_t));
printf("SENSOR:lum:%.2f temp:%.2f hum:%.2f\r\n", data.Lux, data.Temperature, data.Humidity); 输出数据
if (NULL != app_msg)
{
app_msg->msg_type = en_msg_report;
app_msg->msg.report.hum = (int)data.Humidity;
app_msg->msg.report.lum = (int)data.Lux;
app_msg->msg.report.temp = (int)data.Temperature;
if(0 != queue_push(g_app_cb.app_msg,app_msg,CONFIG_QUEUE_TIMEOUT)){
free(app_msg);
}
}
sleep(3);
}
return 0;
}
static void OC_Demo(void)
{
osThreadAttr_t attr;
attr.name = "task_main_entry";
attr.attr_bits = 0U;
attr.cb_mem = NULL;
attr.cb_size = 0U;
attr.stack_mem = NULL;
attr.stack_size = 10240;
attr.priority = 24;
if (osThreadNew((osThreadFunc_t)task_main_entry, NULL, &attr) == NULL)
{
printf("Falied to create task_main_entry!\n"); 创建失败提示
}
attr.stack_size = 2048;
attr.priority = 25;
attr.name = "task_sensor_entry";
if (osThreadNew((osThreadFunc_t)task_sensor_entry, NULL, &attr) == NULL)
{
printf("Falied to create task_sensor_entry!\n"); 创建失败提示
}
}
APP_FEATURE_INIT(OC_Demo);

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)