《算法导论》实验五:最近点对算法(C++)

一、题目描述
在n>=2个点的集合Q中寻找最近点对。
“最近”是指通常意义下的欧几里得距离:即点p1(x1,y1)和p2(x2,y2)之间的距离为:sqrt((x1-x2)2 +(y1-y2)2)。
二、算法设计与分析
算法主要思想就是分治。
情况1:点数小于等于二时:直接计算,求该两点之间的距离。
情况2:集合中有三个点:两两比较,求三个点中的最近的两个点距离。
情况3:点数大于三时:首先划分集合S为SL和SR,使得SL中的每一个点位于SR中每一个点的左边,并且SL和SR中点数相同。分别在SL和SR中解决最近点对问题,得到DL和DR,分别表示SL和SR中的最近点对的距离。令d=min(DL,DR)。如果S中的最近点对(P1,P2)。P1、P2两点一个在SL和一个在SR中,那么P1和P2一定在以L为中心的间隙内,以L-d和L+d为界。
如下图-1所示:
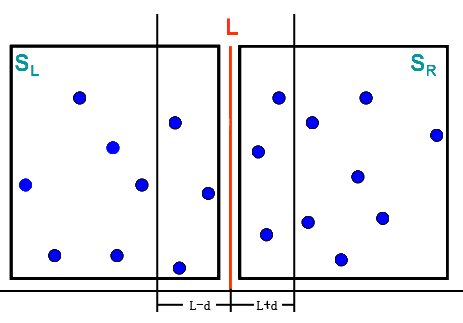
图-1 点数大于三时时分治
如果在SL中的点P和在SR中的点Q成为最近点对,那么P和Q的距离必定小于d。因此对间隙中的每一个点,在合并步骤中,只需要检验yp+d和yp-d内的点即可。
步骤1:根据点的y值和x值对S中的点排序。
步骤2:找出中线L将S划分为SL和SR
步骤3:将步骤2递归的应用解决SL和SR的最近点对问题,并令d=min(dL,dR)。
步骤4:将L-d~L+d内的点以y值排序,对于每一个点(x1,y1)找出y值在y1-d~y1+d内的接下来的7个点,计算距离为d’。如果d’小于d,令d=d’,最后的d值就是答案。
三、实验结果与分析
本实验的所用到的测试用例是用随机函数生成的,所以每次的测试用例都有所不同。但可通过控制台设定需要测试点的个数N。
(一)、当点个数N=1时(输入不合理)。见下图-2:
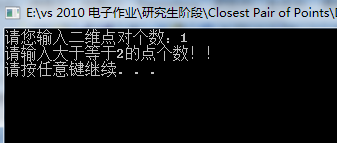
图-2 N=1时(输入不合理)
(二)、当点个数N=2时,见下图-3:
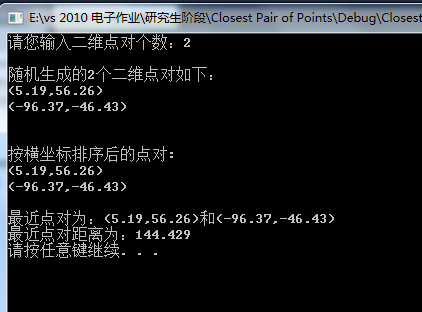
图-3 N=2的输出结果
(三)、当点个数N=3时,见下图-4:
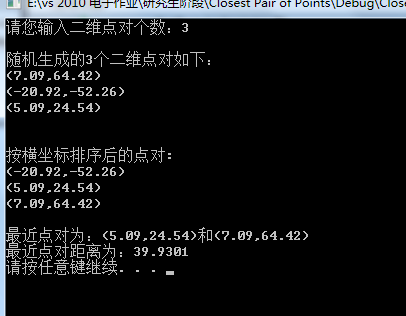
图-4 N=3的输出结果
(四)、当点个数N>3时,见下图-5:
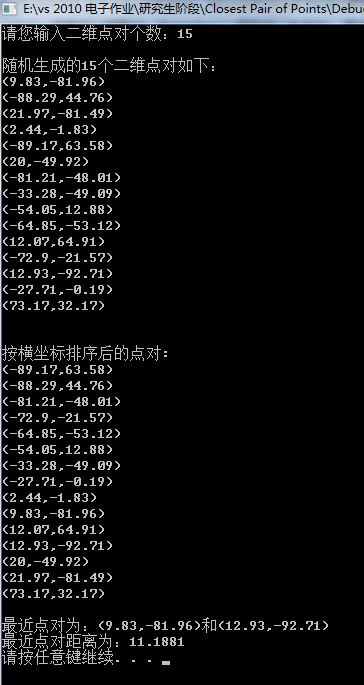
图-5 N=15的输出结果
四、实验总结
1、 采用分治法寻找最近点对时,相较于寻找一维的最近点来说,二维的最近点对寻找要困难许多,难点在于分界线周围的点的处理,即跨分治区域的点的比较。
2、 可证明,处理δ*2δ区间内的点时,只需处理与当前点递增相连的7个点即可。因此可以大大减少开销,提高算法效率,改进算法时间复杂度。
3、 可对点对进行预排序,即在第一次递归调用前,对所有的点进行排序。预排序使运行时间增加了O(nlogn),但这样一来,除递归调用外,递归过程的每一步仅需线性时间。因此算法的整个时间复杂度为O(nlogn)。
五、源代码(C++)
#include <iostream>
#include <ctime>
#include <cmath>
#include <algorithm>
using namespace std; #define NO_DISTANCE 1000000
//定义二维点Point
typedef struct Point
{ float x,y; //二维点的横纵坐标,范围均为[-100,100]
}Point;
//用随机函数对点数组points中的二维点进行初始化
void SetPoints(Point *points,int length)
{ srand(unsigned(time(NULL))); //设置随机种子 for(int i=0;i<length;i++) { points[i].x=(rand()%20000)/100.0-100; //调整rand(),使得横纵坐标范围为[-100,100] points[i].y=(rand()%20000)/100.0-100; }
}
//平面上任意两点对之间的距离公式计算
float Distance(Point a,Point b)
{ return sqrt((a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y));
}
//自定义排序规则:依照结构体中的x成员变量升序排序
bool CmpX(Point a,Point b)
{ return a.x<b.x;
}
//求出最近点对记录,并将两点记录再a、b中
float ClosestPair(Point points[],int length,Point &a,Point &b)
{ float distance; //记录集合points中最近两点距离 float d1,d2; //记录分割后两个子集中各自最小点对距离 int i=0,j=0,k=0; //用于控制for循环的循环变量 Point a1,b1,a2,b2; //保存分割后两个子集中最小点对 if(length<2)return NO_DISTANCE; //若子集长度小于2,定义为最大距离,表示不可达 if(length==2) { a=points[0]; b=points[1]; distance=Distance(points[0],points[1]); } else { Point *pts1=new Point[length]; //开辟两个子集 Point *pts2=new Point[length]; sort(points,points+length,CmpX); //调用algorithm库中的sort函数对points进行排序,CmpX为自定义的排序规则 float mid=points[(length-1)/2].x; //排完序后的中间下标值,即中位数 for(i=0;i<length/2;i++) pts1[i]=points[i]; for(int j=0,i=length/2;i<length;i++) pts2[j++]=points[i]; d1=ClosestPair(pts1,length/2,a1,b1); //分治求解左半部分子集的最近点 d2=ClosestPair(pts2,length-length/2,a2,b2); //分治求解右半部分子集的最近点 if(d1<d2) { distance=d1; a=a1; b=b1;} else { distance=d2; a=a2; b=b2;} //求解跨分割线并在δ×2δ区间内的最近点对 Point *pts3=new Point[length]; for(i=0,k=0;i<length;i++) if(abs(points[i].x-mid)<=distance)pts3[k++]=points[i]; for(i=0;i<k;i++) for(j=i+1;j<=i+7&&j<k;j++) //只需与有序的领接的的7个点进行比较 { if(Distance(pts3[i],pts3[j])<distance) {//如果跨分割线的两点距离小于已知最小距离,则记录该距离 distance=Distance(pts3[i],pts3[j]); a=pts3[i]; b=pts3[j]; } } } return distance;
}
int main()
{ int N; //随机生成的点对个数 Point a,b; float diatance; cout<<"请您输入二维点对个数:"; cin>>N; if(N<2) cout<<"请输入大于等于2的点个数!!"<<endl; else { cout<<endl<<"随机生成的"<<N<<"个二维点对如下:"<<endl; Point *points=new Point[N]; SetPoints(points,N); for(int i=0;i<N;i++) cout<<"("<<points[i].x<<","<<points[i].y<<")"<<endl; diatance=ClosestPair(points,N,a,b); cout<<endl<<endl<<"按横坐标排序后的点对:"<<endl; for(int i=0;i<N;i++) { cout<<"("<<points[i].x<<","<<points[i].y<<")"<<endl; } cout<<endl<<"最近点对为:"<<"("<<a.x<<","<<a.y<<")和"<<"("<<b.x<<","<<b.y<<")"<<endl<<"最近点对距离为:"<<diatance<<endl; } system("pause");
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
文章来源: blog.csdn.net,作者:allinallinallin,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/to_Baidu/article/details/50315607

- 点赞
- 收藏
- 关注作者
评论(0)