基于直方图的图像阈值计算和分割算法FPGA实现,包含tb测试文件和MATLAB辅助验证

【摘要】 1.算法运行效果图预览2.算法运行软件版本VIVADO2019.2 matlab2022a 3.算法理论概述 图像阈值计算和分割是图像处理领域的一项重要任务,它通过设定一个阈值将图像从灰度空间转化为二值空间,从而实现对图像区域的有效划分。基于直方图的阈值选取方法主要依赖于图像的灰度直方图分布特性。 在开始之前,我们需要了解直方图和阈值分割的基本概念: 直方图:图像的直方图是表示图...
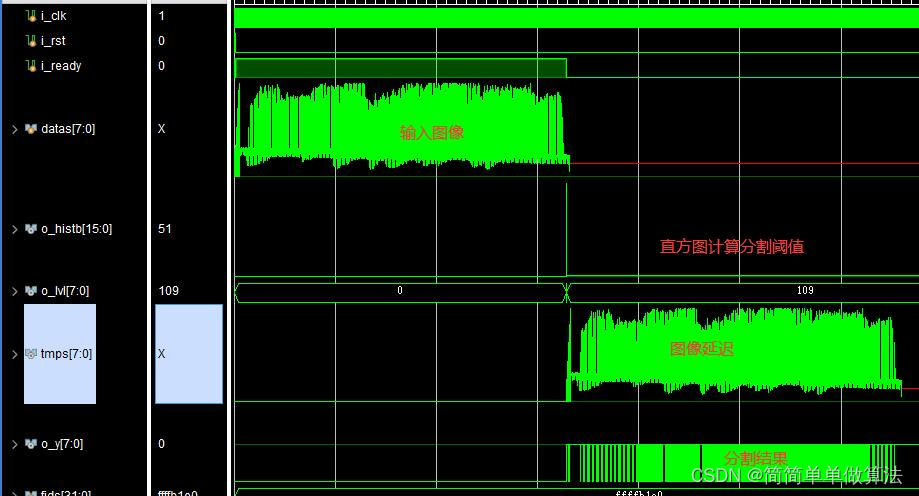
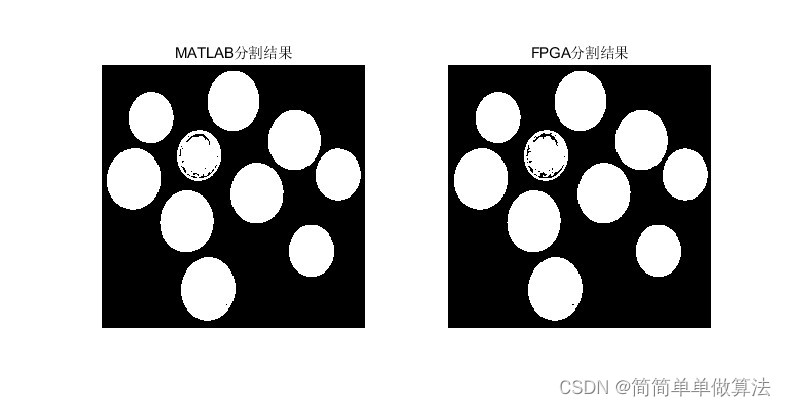
1.算法运行效果图预览


2.算法运行软件版本
VIVADO2019.2
matlab2022a
3.算法理论概述
图像阈值计算和分割是图像处理领域的一项重要任务,它通过设定一个阈值将图像从灰度空间转化为二值空间,从而实现对图像区域的有效划分。基于直方图的阈值选取方法主要依赖于图像的灰度直方图分布特性。
在开始之前,我们需要了解直方图和阈值分割的基本概念:
直方图:图像的直方图是表示图像中每个灰度级出现频率的图表。对于灰度图像,直方图显示了从黑到白(通常是0到255)的灰度值分布。
阈值分割:阈值分割是指通过一个阈值将图像的像素分为两组(通常是前景和背景),使得两组之间的差异最大化。
4.部分核心程序
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Design Name:
// Module Name: test_image
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
//MATLAB/verilog/python/opencv/tensorflow/caffe/C/C++等算法仿真
module test_image;
reg i_clk;
reg i_rst;
reg i_ready;
reg [7:0] Tmp[0:100000];
reg [7:0] datas;
wire[15:0]o_histb;
wire[7:0]o_lvl;
wire[7:0]o_y;
integer fids,jj=0,dat;
//D:\FPGA_Proj\FPGAtest\code2
initial
begin
fids = $fopen("D:\\FPGA_Proj\\FPGAtest\\code2\\data.bmp","rb");
dat = $fread(Tmp,fids);
$fclose(fids);
end
initial
begin
i_clk=1;
i_rst=1;
i_ready=0;
#1000;
i_ready=1;
i_rst=0;
#655350;
i_ready=0;
end
always #5 i_clk=~i_clk;
always@(posedge i_clk)
begin
datas<=Tmp[jj];
jj<=jj+1;
end
im_hist im_hist_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_ready (i_ready),
.i_xin (datas),
.o_histb (o_histb),
.o_lvl (o_lvl),
.o_y (o_y)
);
//将数据导出,由MATLAB显示图像分割效果
integer fout1;
initial begin
fout1 = $fopen("result.txt","w");
end
always @ (posedge i_clk)
begin
if(jj>=66613+1 & jj<=66613+65536)
$fwrite(fout1,"%d\n",o_y);
else
$fwrite(fout1,"%d\n",0);
end
endmodule
【版权声明】本文为华为云社区用户原创内容,未经允许不得转载,如需转载请自行联系原作者进行授权。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)